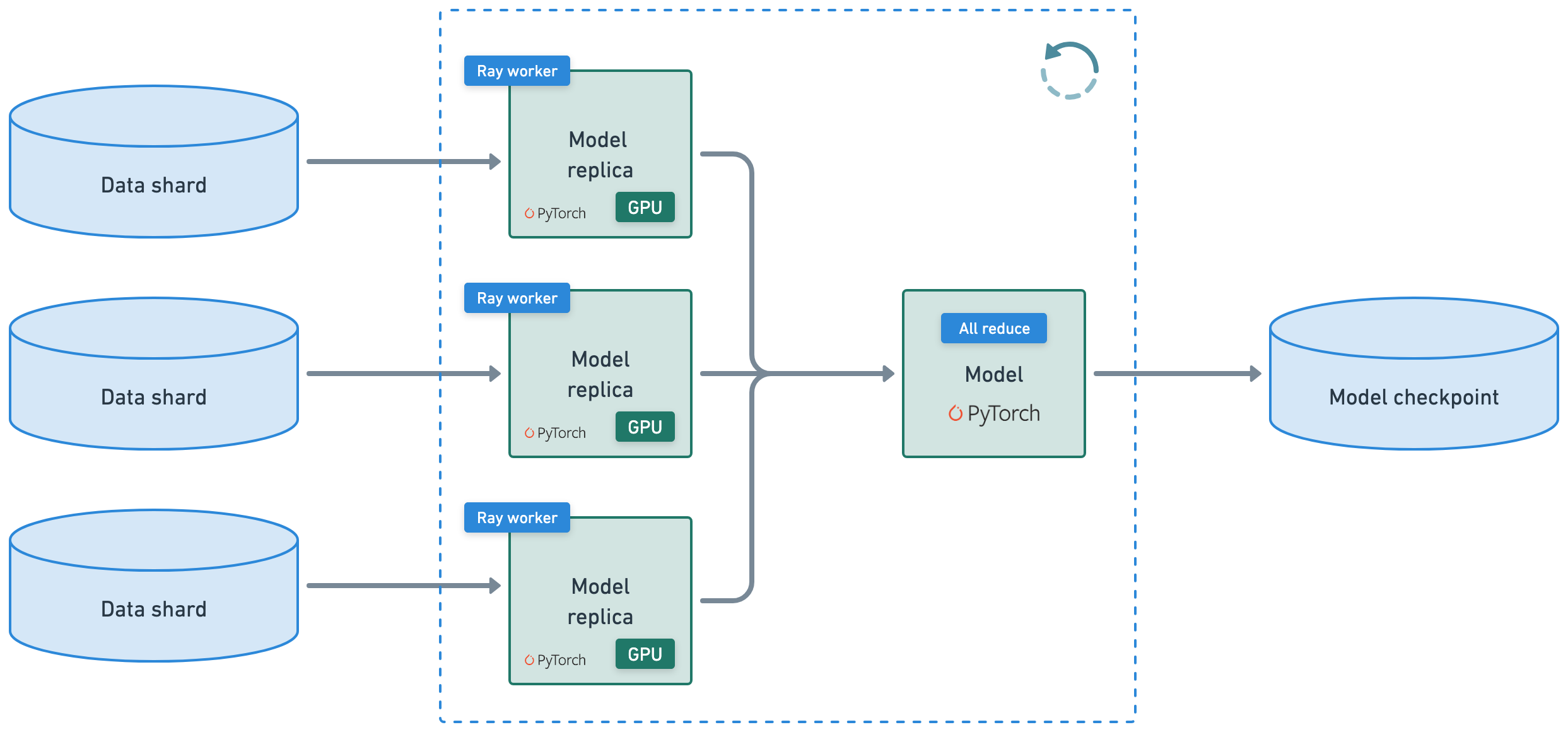
Distributed training#


This tutorial executes a distributed training workload that connects the following heterogeneous workloads:
preprocess the dataset prior to training
distributed training with Ray Train and PyTorch with observability
evaluation (batch inference and eval logic)
save model artifacts to a model registry (MLOps)
Note: this tutorial doesn’t tune the model but see Ray Tune for experiment execution and hyperparameter tuning at any scale.
%%bash
pip install -q -r /home/ray/default/requirements.txt
pip install -q -e /home/ray/default/doggos
Successfully registered `ipywidgets, matplotlib` and 4 other packages to be installed on all cluster nodes.
View and update dependencies here: https://console.anyscale.com/cld_kvedZWag2qA8i5BjxUevf5i7/prj_cz951f43jjdybtzkx1s5sjgz99/workspaces/expwrk_23ry3pgfn3jgq2jk3e5z25udhz?workspace-tab=dependencies
Successfully registered `doggos` package to be installed on all cluster nodes.
View and update dependencies here: https://console.anyscale.com/cld_kvedZWag2qA8i5BjxUevf5i7/prj_cz951f43jjdybtzkx1s5sjgz99/workspaces/expwrk_23ry3pgfn3jgq2jk3e5z25udhz?workspace-tab=dependencies
Note: A kernel restart may be required for all dependencies to become available.
If using uv, then:
Turn off the runtime dependencies (
Dependenciestab up top > Toggle offPip packages). And no need to run thepip installcommands above.Change the python kernel of this notebook to use the
venv(Click onbase (Python x.yy.zz)on top right cordern of notebook >Select another Kernel>Python Environments...>Create Python Environment>Venv>Use Existing) and done! Now all the notebook’s cells will use the virtual env.Change the py executable to use
uv runinstead ofpythonby adding this line after importing ray.
import os
os.environ.pop("RAY_RUNTIME_ENV_HOOK", None)
import ray
ray.init(runtime_env={"py_executable": "uv run", "working_dir": "/home/ray/default"})
%load_ext autoreload
%autoreload all
import os
import ray
import sys
sys.path.append(os.path.abspath("../doggos/"))
# If using UV
# os.environ.pop("RAY_RUNTIME_ENV_HOOK", None)
# Enable Ray Train v2. It's too good to wait for public release!
os.environ["RAY_TRAIN_V2_ENABLED"] = "1"
ray.init(
# connect to existing ray runtime (from previous notebook if still running)
address=os.environ.get("RAY_ADDRESS", "auto"),
runtime_env={
"env_vars": {"RAY_TRAIN_V2_ENABLED": "1"},
# "py_executable": "uv run", # if using uv
# "working_dir": "/home/ray/default", # if using uv
},
)
2025-08-28 05:06:48,041 INFO worker.py:1771 -- Connecting to existing Ray cluster at address: 10.0.17.148:6379...
2025-08-28 05:06:48,052 INFO worker.py:1942 -- Connected to Ray cluster. View the dashboard at https://session-jhxhj69d6ttkjctcxfnsfe7gwk.i.anyscaleuserdata.com
2025-08-28 05:06:48,061 INFO packaging.py:588 -- Creating a file package for local module '/home/ray/default/doggos/doggos'.
2025-08-28 05:06:48,064 INFO packaging.py:380 -- Pushing file package 'gcs://_ray_pkg_86cc12e3f2760ca4.zip' (0.03MiB) to Ray cluster...
2025-08-28 05:06:48,065 INFO packaging.py:393 -- Successfully pushed file package 'gcs://_ray_pkg_86cc12e3f2760ca4.zip'.
2025-08-28 05:06:48,068 INFO packaging.py:380 -- Pushing file package 'gcs://_ray_pkg_563e3191c4f9ed5f5d5e8601702cfa5ff10660e4.zip' (1.09MiB) to Ray cluster...
2025-08-28 05:06:48,073 INFO packaging.py:393 -- Successfully pushed file package 'gcs://_ray_pkg_563e3191c4f9ed5f5d5e8601702cfa5ff10660e4.zip'.
%%bash
# This will be removed once Ray Train v2 is enabled by default.
echo "RAY_TRAIN_V2_ENABLED=1" > /home/ray/default/.env
# Load env vars in notebooks.
from dotenv import load_dotenv
load_dotenv()
True
Preprocess#
You need to convert the classes to labels (unique integers) so that you can train a classifier that can correctly predict the class given an input image. But before you do this, apply the same data ingestion and preprocessing as the previous notebook.
def add_class(row):
row["class"] = row["path"].rsplit("/", 3)[-2]
return row
# Preprocess data splits.
train_ds = ray.data.read_images("s3://doggos-dataset/train", include_paths=True, shuffle="files")
train_ds = train_ds.map(add_class)
val_ds = ray.data.read_images("s3://doggos-dataset/val", include_paths=True)
val_ds = val_ds.map(add_class)
Define a Preprocessor class that:
creates an embedding. A later step moves the embedding layer outside of the model since you freeze the embedding layer’s weights and so you don’t have to do it repeatedly as part of the model’s forward pass, saving on unnecessary compute.
convert the classes into labels for the classifier.
While you could’ve just done this step as a simple operation, you’re taking the time to organize it as a class so that you can save and load for inference later.
def convert_to_label(row, class_to_label):
if "class" in row:
row["label"] = class_to_label[row["class"]]
return row
import numpy as np
from PIL import Image
import torch
from transformers import CLIPModel, CLIPProcessor
from doggos.embed import EmbedImages
class Preprocessor:
"""Preprocessor class."""
def __init__(self, class_to_label=None):
self.class_to_label = class_to_label or {} # mutable defaults
self.label_to_class = {v: k for k, v in self.class_to_label.items()}
def fit(self, ds, column):
self.classes = ds.unique(column=column)
self.class_to_label = {tag: i for i, tag in enumerate(self.classes)}
self.label_to_class = {v: k for k, v in self.class_to_label.items()}
return self
def transform(self, ds, concurrency=4, batch_size=64, num_gpus=1):
ds = ds.map(
convert_to_label,
fn_kwargs={"class_to_label": self.class_to_label},
)
ds = ds.map_batches(
EmbedImages,
fn_constructor_kwargs={
"model_id": "openai/clip-vit-base-patch32",
"device": "cuda",
},
concurrency=4,
batch_size=64,
num_gpus=1,
accelerator_type="T4",
)
ds = ds.drop_columns(["image"])
return ds
def save(self, fp):
with open(fp, "w") as f:
json.dump(self.class_to_label, f)
# Preprocess.
preprocessor = Preprocessor()
preprocessor = preprocessor.fit(train_ds, column="class")
train_ds = preprocessor.transform(ds=train_ds)
val_ds = preprocessor.transform(ds=val_ds)
2025-08-28 05:06:54,182 INFO dataset.py:3248 -- Tip: Use `take_batch()` instead of `take() / show()` to return records in pandas or numpy batch format.
2025-08-28 05:06:54,184 INFO logging.py:295 -- Registered dataset logger for dataset dataset_14_0
2025-08-28 05:06:54,206 INFO streaming_executor.py:159 -- Starting execution of Dataset dataset_14_0. Full logs are in /tmp/ray/session_2025-08-28_04-57-43_348032_12595/logs/ray-data
2025-08-28 05:06:54,207 INFO streaming_executor.py:160 -- Execution plan of Dataset dataset_14_0: InputDataBuffer[Input] -> TaskPoolMapOperator[ListFiles] -> TaskPoolMapOperator[ReadFiles] -> TaskPoolMapOperator[Map(add_class)] -> AllToAllOperator[Aggregate] -> LimitOperator[limit=1]
2025-08-28 05:06:54,275 WARNING resource_manager.py:134 -- ⚠️ Ray's object store is configured to use only 28.5% of available memory (63.9GiB out of 224.0GiB total). For optimal Ray Data performance, we recommend setting the object store to at least 50% of available memory. You can do this by setting the 'object_store_memory' parameter when calling ray.init() or by setting the RAY_DEFAULT_OBJECT_STORE_MEMORY_PROPORTION environment variable.
2025-08-28 05:07:03,480 INFO streaming_executor.py:279 -- ✔️ Dataset dataset_14_0 execution finished in 9.27 seconds
See this extensive guide on data loading and preprocessing for the last-mile preprocessing you need to do prior to training your models. However, Ray Data does support performant joins, filters, aggregations, etc., for the more structure data processing your workloads may need.
import shutil
# Write processed data to cloud storage.
preprocessed_data_path = os.path.join("/mnt/cluster_storage", "doggos/preprocessed_data")
if os.path.exists(preprocessed_data_path): # Clean up.
shutil.rmtree(preprocessed_data_path)
preprocessed_train_path = os.path.join(preprocessed_data_path, "preprocessed_train")
preprocessed_val_path = os.path.join(preprocessed_data_path, "preprocessed_val")
train_ds.write_parquet(preprocessed_train_path)
val_ds.write_parquet(preprocessed_val_path)
2025-08-28 05:07:04,254 INFO logging.py:295 -- Registered dataset logger for dataset dataset_22_0
2025-08-28 05:07:04,270 INFO streaming_executor.py:159 -- Starting execution of Dataset dataset_22_0. Full logs are in /tmp/ray/session_2025-08-28_04-57-43_348032_12595/logs/ray-data
2025-08-28 05:07:04,271 INFO streaming_executor.py:160 -- Execution plan of Dataset dataset_22_0: InputDataBuffer[Input] -> TaskPoolMapOperator[ListFiles] -> TaskPoolMapOperator[ReadFiles] -> TaskPoolMapOperator[Map(add_class)->Map(convert_to_label)] -> ActorPoolMapOperator[MapBatches(EmbedImages)] -> TaskPoolMapOperator[MapBatches(drop_columns)->Write]
(MapWorker(MapBatches(EmbedImages)) pid=9215, ip=10.0.5.252) Using a slow image processor as `use_fast` is unset and a slow processor was saved with this model. `use_fast=True` will be the default behavior in v4.52, even if the model was saved with a slow processor. This will result in minor differences in outputs. You'll still be able to use a slow processor with `use_fast=False`.
2025-08-28 05:07:20,682 INFO streaming_executor.py:279 -- ✔️ Dataset dataset_22_0 execution finished in 16.41 seconds
2025-08-28 05:07:20,747 INFO dataset.py:4871 -- Data sink Parquet finished. 2880 rows and 5.9MB data written.
2025-08-28 05:07:20,759 INFO logging.py:295 -- Registered dataset logger for dataset dataset_25_0
2025-08-28 05:07:20,774 INFO streaming_executor.py:159 -- Starting execution of Dataset dataset_25_0. Full logs are in /tmp/ray/session_2025-08-28_04-57-43_348032_12595/logs/ray-data
2025-08-28 05:07:20,775 INFO streaming_executor.py:160 -- Execution plan of Dataset dataset_25_0: InputDataBuffer[Input] -> TaskPoolMapOperator[ListFiles] -> TaskPoolMapOperator[ReadFiles] -> TaskPoolMapOperator[Map(add_class)->Map(convert_to_label)] -> ActorPoolMapOperator[MapBatches(EmbedImages)] -> TaskPoolMapOperator[MapBatches(drop_columns)->Write]
2025-08-28 05:07:22,417 WARNING streaming_executor_state.py:790 -- Operator produced a RefBundle with a different schema than the previous one. Previous schema: image: extension<ray.data.arrow_variable_shaped_tensor<ArrowVariableShapedTensorType>>
path: string, new schema: image: extension<ray.data.arrow_tensor_v2<ArrowTensorTypeV2>>
path: string. This may lead to unexpected behavior.
2025-08-28 05:07:22,642 WARNING streaming_executor_state.py:790 -- Operator produced a RefBundle with a different schema than the previous one. Previous schema: image: extension<ray.data.arrow_variable_shaped_tensor<ArrowVariableShapedTensorType>>
path: string
class: string
label: int64, new schema: image: extension<ray.data.arrow_tensor_v2<ArrowTensorTypeV2>>
path: string
class: string
label: int64. This may lead to unexpected behavior.
(MapWorker(MapBatches(EmbedImages)) pid=23307, ip=10.0.5.252) Using a slow image processor as `use_fast` is unset and a slow processor was saved with this model. `use_fast=True` will be the default behavior in v4.52, even if the model was saved with a slow processor. This will result in minor differences in outputs. You'll still be able to use a slow processor with `use_fast=False`. [repeated 4x across cluster] (Ray deduplicates logs by default. Set RAY_DEDUP_LOGS=0 to disable log deduplication, or see https://docs.ray.io/en/master/ray-observability/user-guides/configure-logging.html#log-deduplication for more options.)
2025-08-28 05:07:33,184 INFO streaming_executor.py:279 -- ✔️ Dataset dataset_25_0 execution finished in 12.41 seconds
2025-08-28 05:07:33,214 INFO dataset.py:4871 -- Data sink Parquet finished. 720 rows and 1.5MB data written.
Store the preprocessed data into shared cloud storage to:
save a record of what this preprocessed data looks like
avoid triggering the entire preprocessing for each batch the model processes
avoid
materializeof the preprocessed data because you shouldn’t force large data to fit in memory
Model#
Define the model – a simple two layer neural net with Softmax layer to predict class probabilities. Notice that it’s all just base PyTorch and nothing else.
import json
from pathlib import Path
import torch
import torch.nn as nn
import torch.nn.functional as F
class ClassificationModel(torch.nn.Module):
def __init__(self, embedding_dim, hidden_dim, dropout_p, num_classes):
super().__init__()
# Hyperparameters
self.embedding_dim = embedding_dim
self.hidden_dim = hidden_dim
self.dropout_p = dropout_p
self.num_classes = num_classes
# Define layers
self.fc1 = nn.Linear(embedding_dim, hidden_dim)
self.batch_norm = nn.BatchNorm1d(hidden_dim)
self.relu = nn.ReLU()
self.dropout = nn.Dropout(dropout_p)
self.fc2 = nn.Linear(hidden_dim, num_classes)
def forward(self, batch):
z = self.fc1(batch["embedding"])
z = self.batch_norm(z)
z = self.relu(z)
z = self.dropout(z)
z = self.fc2(z)
return z
@torch.inference_mode()
def predict(self, batch):
z = self(batch)
y_pred = torch.argmax(z, dim=1).cpu().numpy()
return y_pred
@torch.inference_mode()
def predict_probabilities(self, batch):
z = self(batch)
y_probs = F.softmax(z, dim=1).cpu().numpy()
return y_probs
def save(self, dp):
Path(dp).mkdir(parents=True, exist_ok=True)
with open(Path(dp, "args.json"), "w") as fp:
json.dump({
"embedding_dim": self.embedding_dim,
"hidden_dim": self.hidden_dim,
"dropout_p": self.dropout_p,
"num_classes": self.num_classes,
}, fp, indent=4)
torch.save(self.state_dict(), Path(dp, "model.pt"))
@classmethod
def load(cls, args_fp, state_dict_fp, device="cpu"):
with open(args_fp, "r") as fp:
model = cls(**json.load(fp))
model.load_state_dict(torch.load(state_dict_fp, map_location=device))
return model
# Initialize model.
num_classes = len(preprocessor.classes)
model = ClassificationModel(
embedding_dim=512,
hidden_dim=256,
dropout_p=0.3,
num_classes=num_classes,
)
print (model)
ClassificationModel(
(fc1): Linear(in_features=512, out_features=256, bias=True)
(batch_norm): BatchNorm1d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU()
(dropout): Dropout(p=0.3, inplace=False)
(fc2): Linear(in_features=256, out_features=36, bias=True)
)
Batching#
Take a look at a sample batch of data and ensure that tensors have the proper data type.
from ray.train.torch import get_device
def collate_fn(batch, device=None):
dtypes = {"embedding": torch.float32, "label": torch.int64}
tensor_batch = {}
# If no device is provided, try to get it from Ray Train context
if device is None:
try:
device = get_device()
except RuntimeError:
# When not in Ray Train context, use CPU for testing
device = "cpu"
for key in dtypes.keys():
if key in batch:
tensor_batch[key] = torch.as_tensor(
batch[key],
dtype=dtypes[key],
device=device,
)
return tensor_batch
# Sample batch
sample_batch = train_ds.take_batch(batch_size=3)
collate_fn(batch=sample_batch, device="cpu")
2025-08-28 05:07:34,380 INFO logging.py:295 -- Registered dataset logger for dataset dataset_27_0
2025-08-28 05:07:34,394 INFO streaming_executor.py:159 -- Starting execution of Dataset dataset_27_0. Full logs are in /tmp/ray/session_2025-08-28_04-57-43_348032_12595/logs/ray-data
2025-08-28 05:07:34,395 INFO streaming_executor.py:160 -- Execution plan of Dataset dataset_27_0: InputDataBuffer[Input] -> TaskPoolMapOperator[ListFiles] -> TaskPoolMapOperator[ReadFiles] -> TaskPoolMapOperator[Map(add_class)->Map(convert_to_label)] -> ActorPoolMapOperator[MapBatches(EmbedImages)] -> TaskPoolMapOperator[MapBatches(drop_columns)] -> LimitOperator[limit=3]
(MapWorker(MapBatches(EmbedImages)) pid=26114, ip=10.0.5.252) Using a slow image processor as `use_fast` is unset and a slow processor was saved with this model. `use_fast=True` will be the default behavior in v4.52, even if the model was saved with a slow processor. This will result in minor differences in outputs. You'll still be able to use a slow processor with `use_fast=False`.
2025-08-28 05:07:45,755 INFO streaming_executor.py:279 -- ✔️ Dataset dataset_27_0 execution finished in 11.36 seconds
/tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.)
tensor_batch[key] = torch.as_tensor(
{'embedding': tensor([[ 0.0245, 0.6505, 0.0627, ..., 0.4001, -0.2721, -0.0673],
[-0.2416, 0.2315, 0.0255, ..., 0.4065, 0.2805, -0.1156],
[-0.2301, -0.3628, 0.1086, ..., 0.3038, 0.0543, 0.6214]]),
'label': tensor([10, 29, 27])}
Model registry#
Create a model registry in Anyscale user storage to save the model checkpoints to. Use OSS MLflow but you can easily set up other experiment trackers with Ray.
import shutil
model_registry = "/mnt/cluster_storage/mlflow/doggos"
if os.path.isdir(model_registry):
shutil.rmtree(model_registry) # clean up
os.makedirs(model_registry, exist_ok=True)
Training#
Define the training workload by specifying the:
experiment and model parameters
compute scaling configuration
forward pass for batches of training and validation data
train loop for each epoch of data and checkpointing
# Train loop config.
experiment_name = "doggos"
train_loop_config = {
"model_registry": model_registry,
"experiment_name": experiment_name,
"embedding_dim": 512,
"hidden_dim": 256,
"dropout_p": 0.3,
"lr": 1e-3,
"lr_factor": 0.8,
"lr_patience": 3,
"num_epochs": 20,
"batch_size": 256,
}
# Scaling config
num_workers = 4
scaling_config = ray.train.ScalingConfig(
num_workers=num_workers,
use_gpu=True,
resources_per_worker={"CPU": 8, "GPU": 2},
accelerator_type="T4",
)
import tempfile
import mlflow
import numpy as np
from ray.train.torch import TorchTrainer
def train_epoch(ds, batch_size, model, num_classes, loss_fn, optimizer):
model.train()
loss = 0.0
ds_generator = ds.iter_torch_batches(batch_size=batch_size, collate_fn=collate_fn)
for i, batch in enumerate(ds_generator):
optimizer.zero_grad() # Reset gradients.
z = model(batch) # Forward pass.
targets = F.one_hot(batch["label"], num_classes=num_classes).float()
J = loss_fn(z, targets) # Define loss.
J.backward() # Backward pass.
optimizer.step() # Update weights.
loss += (J.detach().item() - loss) / (i + 1) # Cumulative loss
return loss
def eval_epoch(ds, batch_size, model, num_classes, loss_fn):
model.eval()
loss = 0.0
y_trues, y_preds = [], []
ds_generator = ds.iter_torch_batches(batch_size=batch_size, collate_fn=collate_fn)
with torch.inference_mode():
for i, batch in enumerate(ds_generator):
z = model(batch)
targets = F.one_hot(batch["label"], num_classes=num_classes).float() # one-hot (for loss_fn)
J = loss_fn(z, targets).item()
loss += (J - loss) / (i + 1)
y_trues.extend(batch["label"].cpu().numpy())
y_preds.extend(torch.argmax(z, dim=1).cpu().numpy())
return loss, np.vstack(y_trues), np.vstack(y_preds)
def train_loop_per_worker(config):
# Hyperparameters.
model_registry = config["model_registry"]
experiment_name = config["experiment_name"]
embedding_dim = config["embedding_dim"]
hidden_dim = config["hidden_dim"]
dropout_p = config["dropout_p"]
lr = config["lr"]
lr_factor = config["lr_factor"]
lr_patience = config["lr_patience"]
num_epochs = config["num_epochs"]
batch_size = config["batch_size"]
num_classes = config["num_classes"]
# Experiment tracking.
if ray.train.get_context().get_world_rank() == 0:
mlflow.set_tracking_uri(f"file:{model_registry}")
mlflow.set_experiment(experiment_name)
mlflow.start_run()
mlflow.log_params(config)
# Datasets.
train_ds = ray.train.get_dataset_shard("train")
val_ds = ray.train.get_dataset_shard("val")
# Model.
model = ClassificationModel(
embedding_dim=embedding_dim,
hidden_dim=hidden_dim,
dropout_p=dropout_p,
num_classes=num_classes,
)
model = ray.train.torch.prepare_model(model)
# Training components.
loss_fn = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=lr)
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer,
mode="min",
factor=lr_factor,
patience=lr_patience,
)
# Training.
best_val_loss = float("inf")
for epoch in range(num_epochs):
# Steps
train_loss = train_epoch(train_ds, batch_size, model, num_classes, loss_fn, optimizer)
val_loss, _, _ = eval_epoch(val_ds, batch_size, model, num_classes, loss_fn)
scheduler.step(val_loss)
# Checkpoint (metrics, preprocessor and model artifacts).
with tempfile.TemporaryDirectory() as dp:
model.module.save(dp=dp)
metrics = dict(lr=optimizer.param_groups[0]["lr"], train_loss=train_loss, val_loss=val_loss)
with open(os.path.join(dp, "class_to_label.json"), "w") as fp:
json.dump(config["class_to_label"], fp, indent=4)
if ray.train.get_context().get_world_rank() == 0: # only on main worker 0
mlflow.log_metrics(metrics, step=epoch)
if val_loss < best_val_loss:
best_val_loss = val_loss
mlflow.log_artifacts(dp)
# End experiment tracking.
if ray.train.get_context().get_world_rank() == 0:
mlflow.end_run()
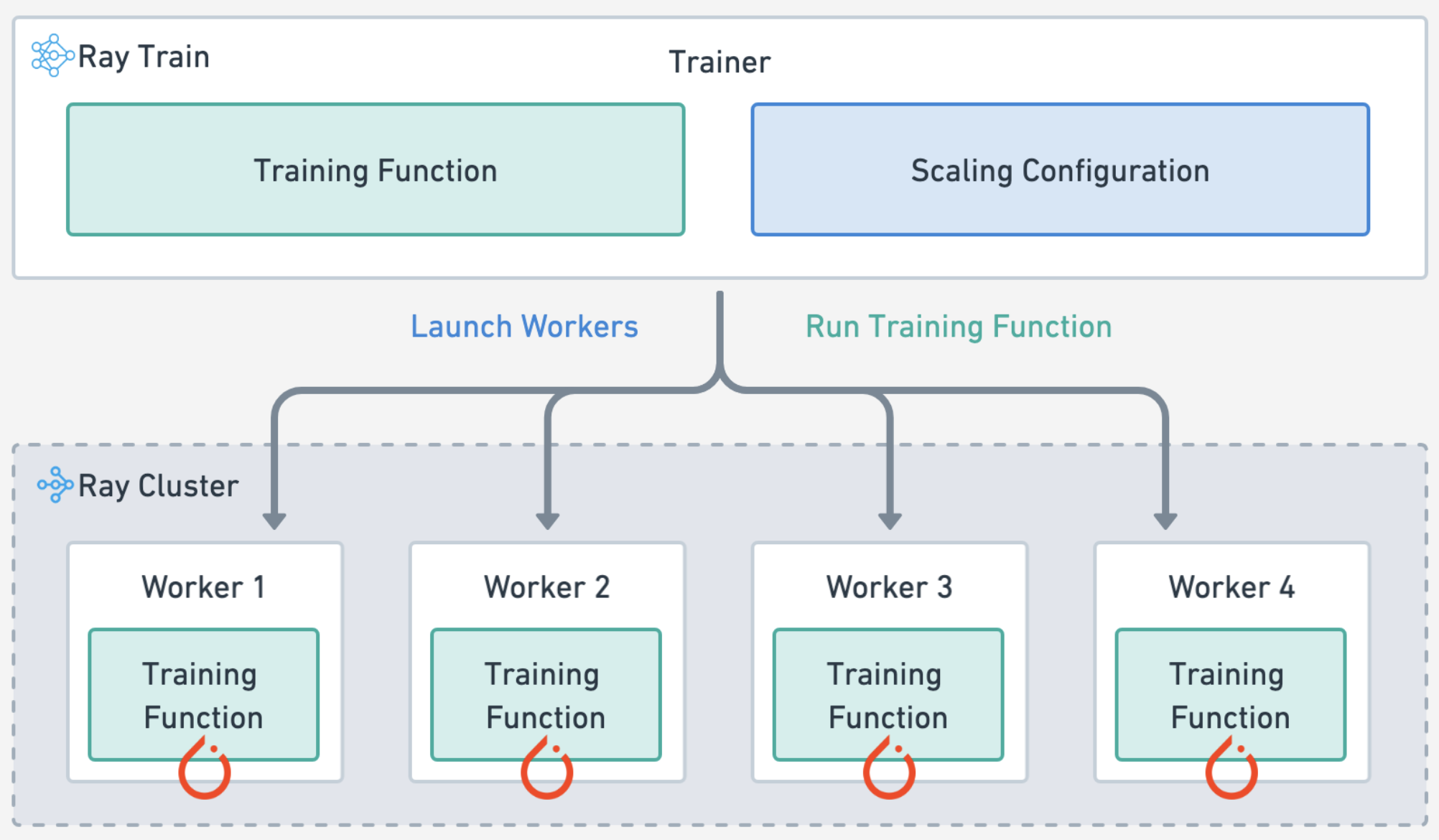
Notice that there isn’t much new Ray Train code on top of the base PyTorch code. You specified how you want to scale out the training workload, load the Ray datasets, and then checkpoint on the main worker node and that’s it. See these guides (PyTorch, PyTorch Lightning, Hugging Face Transformers) to see the minimal change in code needed to distribute your training workloads. See this extensive list of Ray Train user guides.
# Load preprocessed datasets.
preprocessed_train_ds = ray.data.read_parquet(preprocessed_train_path)
preprocessed_val_ds = ray.data.read_parquet(preprocessed_val_path)
/home/ray/anaconda3/lib/python3.12/site-packages/ray/data/_internal/datasource/parquet_datasource.py:750: FutureWarning: The default `file_extensions` for `read_parquet` will change from `None` to ['parquet'] after Ray 2.43, and your dataset contains files that don't match the new `file_extensions`. To maintain backwards compatibility, set `file_extensions=None` explicitly.
warnings.warn(
# Trainer.
train_loop_config["class_to_label"] = preprocessor.class_to_label
train_loop_config["num_classes"] = len(preprocessor.class_to_label)
trainer = TorchTrainer(
train_loop_per_worker=train_loop_per_worker,
train_loop_config=train_loop_config,
scaling_config=scaling_config,
datasets={"train": preprocessed_train_ds, "val": preprocessed_val_ds},
)
# Train.
results = trainer.fit()
Ray Train#
automatically handles multi-node, multi-GPU setup with no manual SSH setup or hostfile configs.
define per-worker fractional resource requirements, for example, 2 CPUs and 0.5 GPU per worker.
run on heterogeneous machines and scale flexibly, for example, CPU for preprocessing and GPU for training.
built-in fault tolerance with retry of failed workers and continue from last checkpoint.
supports Data Parallel, Model Parallel, Parameter Server, and even custom strategies.
Ray Compiled graphs allow you to even define different parallelism for jointly optimizing multiple models like Megatron, DeepSpeed, etc., or only allow for one global setting.
You can also use Torch DDP, FSPD, DeepSpeed, etc., under the hood.
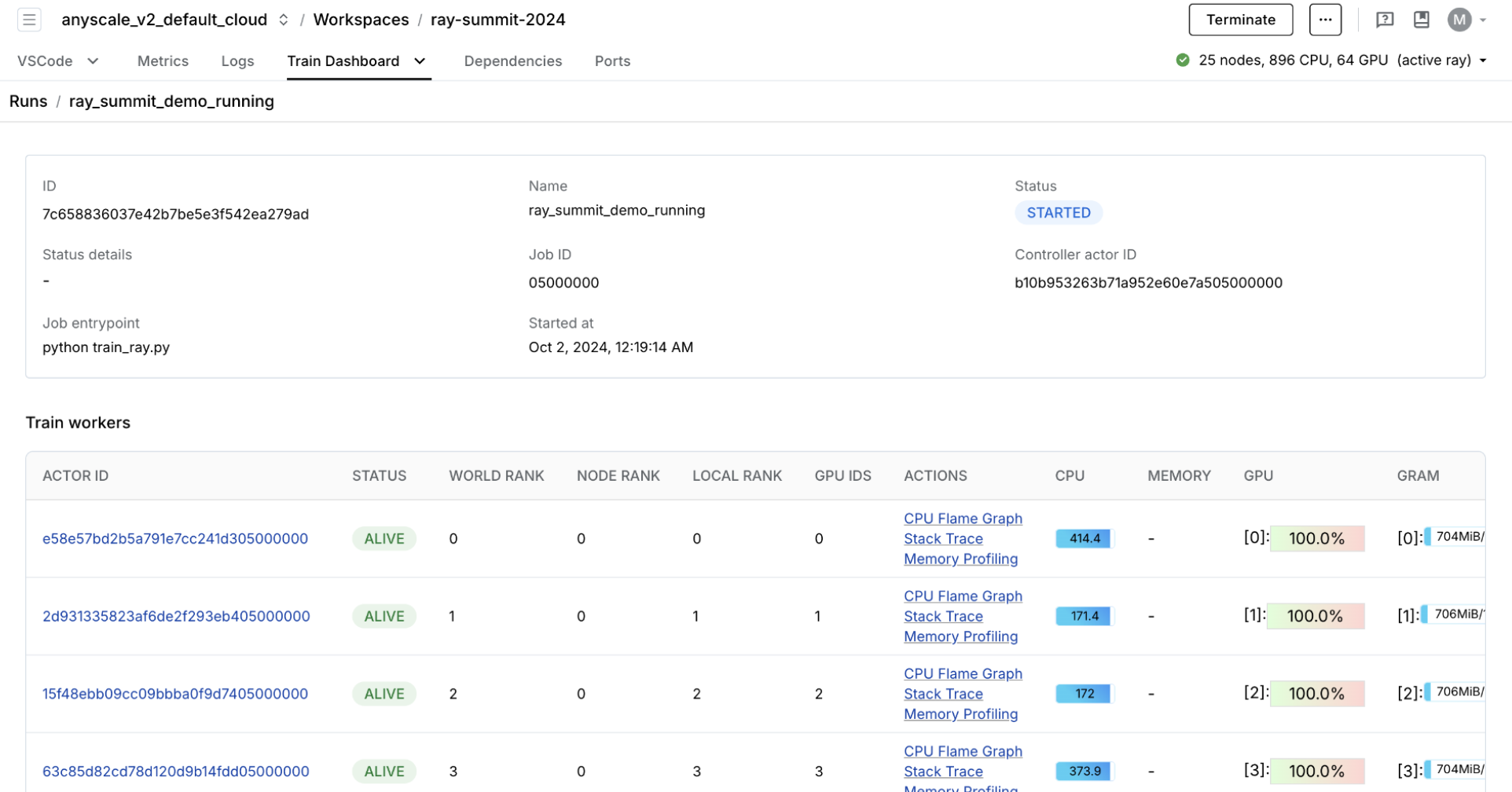
🔥 RayTurbo Train offers even more improvement to the price-performance ratio, performance monitoring and more:
elastic training to scale to a dynamic number of workers, continue training on fewer resources, even on spot instances.
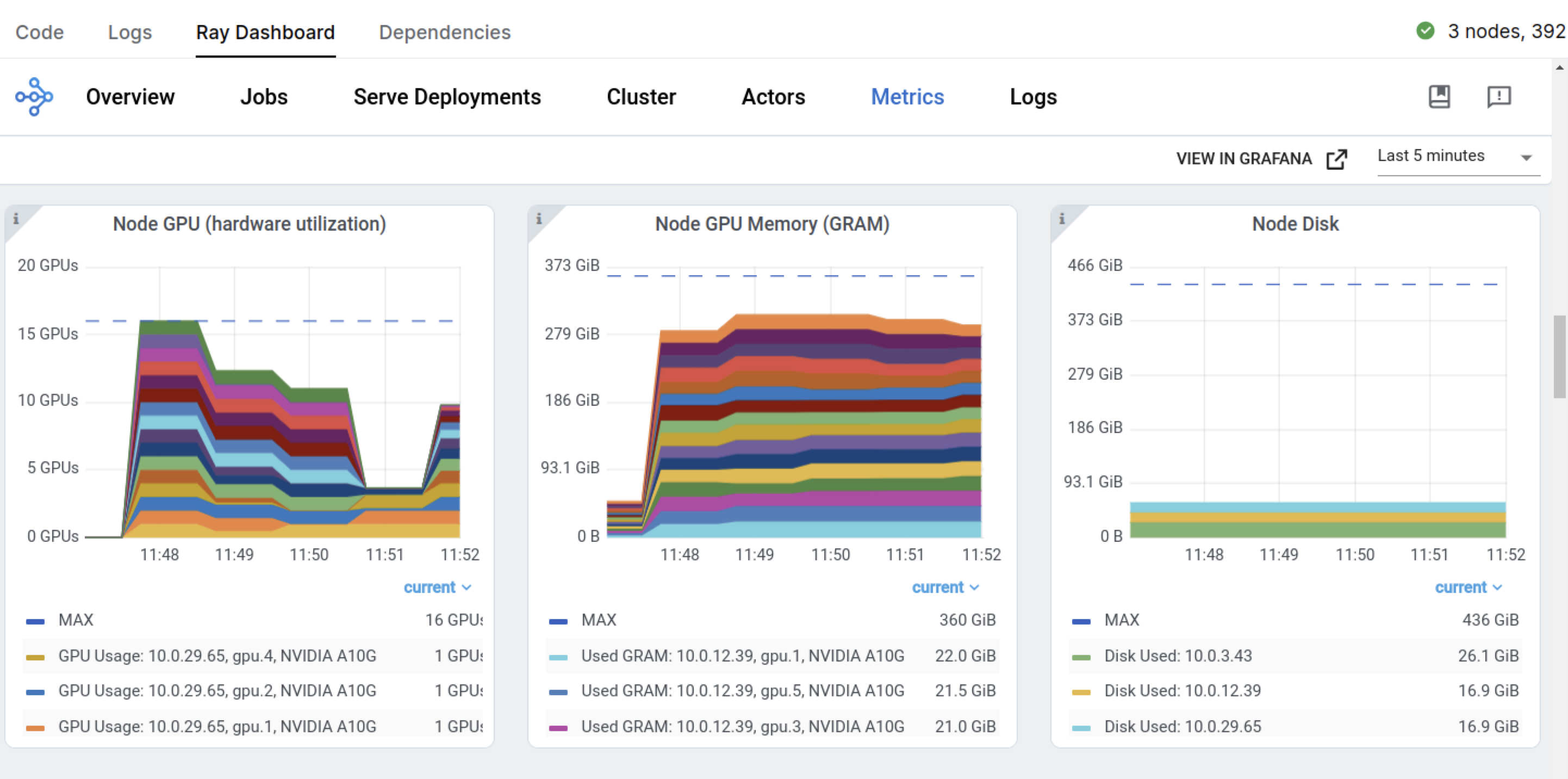
purpose-built dashboard designed to streamline the debugging of Ray Train workloads:
Monitoring: View the status of training runs and train workers.
Metrics: See insights on training throughput and training system operation time.
Profiling: Investigate bottlenecks, hangs, or errors from individual training worker processes.
You can view experiment metrics and model artifacts in the model registry. You’re using OSS MLflow so you can run the server by pointing to the model registry location:
mlflow server -h 0.0.0.0 -p 8080 --backend-store-uri /mnt/cluster_storage/mlflow/doggos
You can view the dashboard by going to the Overview tab > Open Ports.
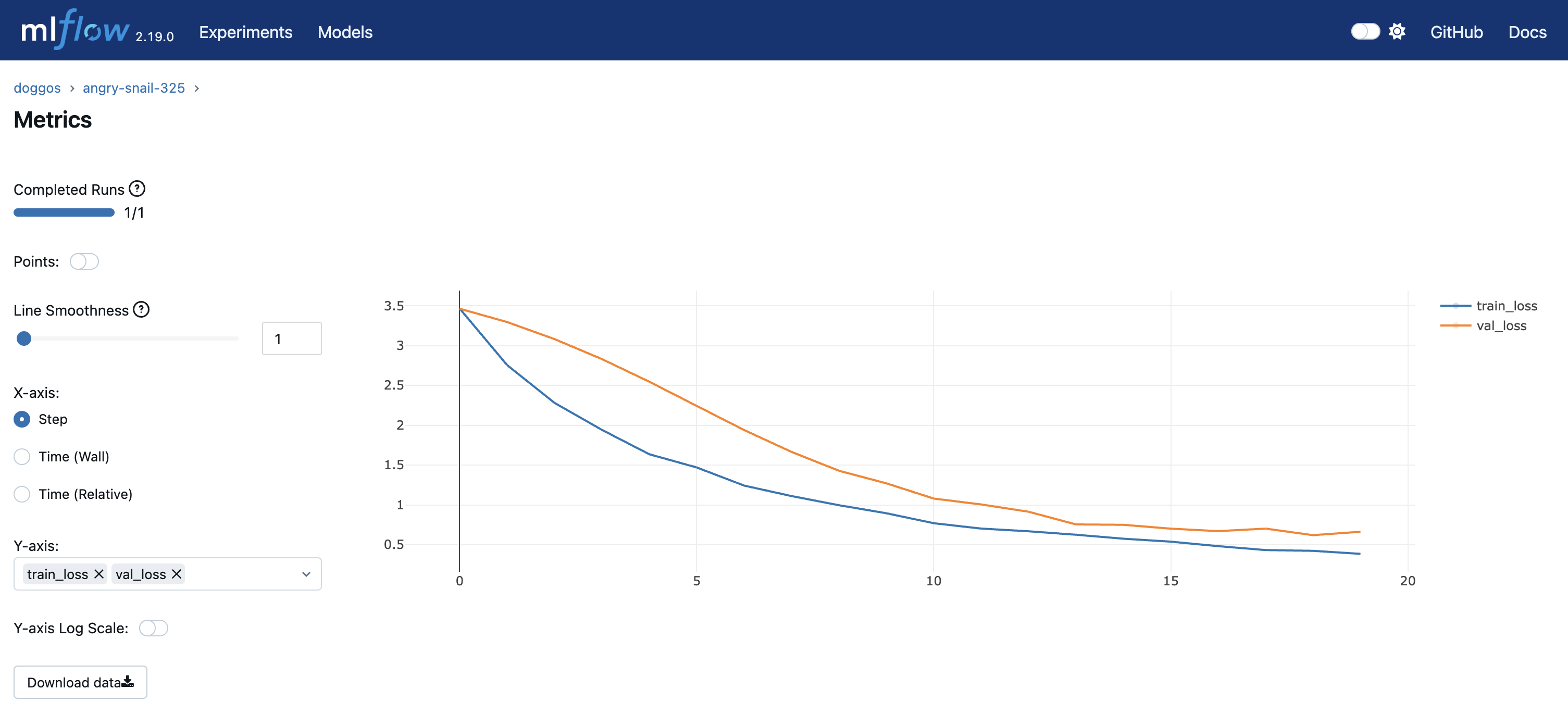
You also have the preceding Ray Dashboard and Train workload specific dashboards.
# Sorted runs
mlflow.set_tracking_uri(f"file:{model_registry}")
sorted_runs = mlflow.search_runs(
experiment_names=[experiment_name],
order_by=["metrics.val_loss ASC"])
best_run = sorted_runs.iloc[0]
best_run
run_id d54aa07059384d139ea572123ae9409c
experiment_id 653138458592289747
status FINISHED
artifact_uri file:///mnt/cluster_storage/mlflow/doggos/6531...
start_time 2025-08-28 05:10:15.049000+00:00
end_time 2025-08-28 05:10:33.936000+00:00
metrics.lr 0.001
metrics.val_loss 0.778273
metrics.train_loss 0.39104
params.lr_factor 0.8
params.hidden_dim 256
params.embedding_dim 512
params.dropout_p 0.3
params.experiment_name doggos
params.batch_size 256
params.lr 0.001
params.num_classes 36
params.class_to_label {'pomeranian': 0, 'rottweiler': 1, 'boxer': 2,...
params.num_epochs 20
params.lr_patience 3
params.model_registry /mnt/cluster_storage/mlflow/doggos
tags.mlflow.source.name /home/ray/anaconda3/lib/python3.12/site-packag...
tags.mlflow.source.type LOCAL
tags.mlflow.runName judicious-panda-916
tags.mlflow.user ray
Name: 0, dtype: object
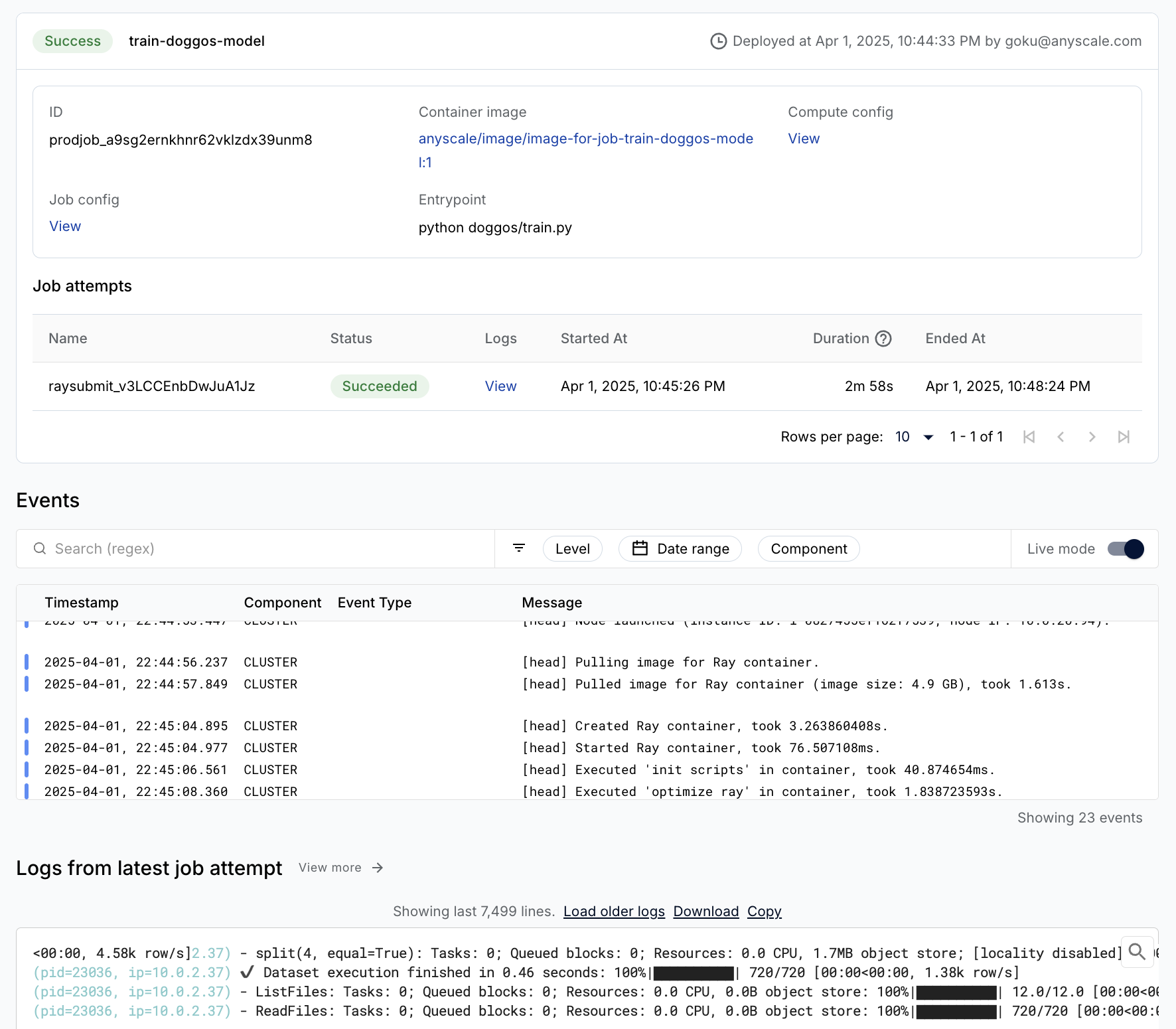
Production Job#
You can easily wrap the training workload as a production grade Anyscale Job (API ref).
Note:
This Job uses a
containerfileto define dependencies, but you could easily use a pre-built image as well.You can specify the compute as a compute config or inline in a job config file.
When you don’t specify compute while launching from a workspace, this configuration defaults to the compute configuration of the workspace.
%%bash
# Production model training job
anyscale job submit -f /home/ray/default/configs/train_model.yaml
Output
(anyscale +0.8s) Submitting job with config JobConfig(name='train-image-model', image_uri='anyscale/ray:2.48.0-slim-py312-cu128', compute_config=None, env_vars=None, py_modules=['/home/ray/default/doggos'], py_executable=None, cloud=None, project=None, ray_version=None, job_queue_config=None).
(anyscale +3.0s) Uploading local dir '/home/ray/default' to cloud storage.
(anyscale +3.8s) Uploading local dir '/home/ray/default/doggos' to cloud storage.
(anyscale +4.9s) Job 'train-image-model' submitted, ID: 'prodjob_zfy5ak9a5masjb4vuidtxvxpqt'.
(anyscale +4.9s) View the job in the UI: https://console.anyscale.com/jobs/prodjob_zfy5ak9a5masjb4vuidtxvxpqt
(anyscale +4.9s) Use `--wait` to wait for the job to run and stream logs.
Evaluation#
This tutorial concludes by evaluating the trained model on the test dataset. Evaluation is essentially the same as the batch inference workload where you apply the model on batches of data and then calculate metrics using the predictions versus true labels. Ray Data is hyper optimized for throughput so preserving order isn’t a priority. But for evaluation, this approach is crucial. Achieve this approach by preserving the entire row and adding the predicted label as another column to each row.
from urllib.parse import urlparse
from sklearn.metrics import multilabel_confusion_matrix
class TorchPredictor:
def __init__(self, preprocessor, model):
self.preprocessor = preprocessor
self.model = model
self.model.eval()
def __call__(self, batch, device="cuda"):
self.model.to(device)
batch["prediction"] = self.model.predict(collate_fn(batch, device=device))
return batch
def predict_probabilities(self, batch, device="cuda"):
self.model.to(device)
predicted_probabilities = self.model.predict_probabilities(collate_fn(batch, device=device))
batch["probabilities"] = [
{
self.preprocessor.label_to_class[i]: float(prob)
for i, prob in enumerate(probabilities)
}
for probabilities in predicted_probabilities
]
return batch
@classmethod
def from_artifacts_dir(cls, artifacts_dir):
with open(os.path.join(artifacts_dir, "class_to_label.json"), "r") as fp:
class_to_label = json.load(fp)
preprocessor = Preprocessor(class_to_label=class_to_label)
model = ClassificationModel.load(
args_fp=os.path.join(artifacts_dir, "args.json"),
state_dict_fp=os.path.join(artifacts_dir, "model.pt"),
)
return cls(preprocessor=preprocessor, model=model)
# Load and preproces eval dataset.
artifacts_dir = urlparse(best_run.artifact_uri).path
predictor = TorchPredictor.from_artifacts_dir(artifacts_dir=artifacts_dir)
test_ds = ray.data.read_images("s3://doggos-dataset/test", include_paths=True)
test_ds = test_ds.map(add_class)
test_ds = predictor.preprocessor.transform(ds=test_ds)
# y_pred (batch inference).
pred_ds = test_ds.map_batches(
predictor,
concurrency=4,
batch_size=64,
num_gpus=1,
accelerator_type="T4",
)
pred_ds.take(1)
2025-08-28 05:10:42,369 INFO logging.py:295 -- Registered dataset logger for dataset dataset_40_0
2025-08-28 05:10:42,388 INFO streaming_executor.py:159 -- Starting execution of Dataset dataset_40_0. Full logs are in /tmp/ray/session_2025-08-28_04-57-43_348032_12595/logs/ray-data
2025-08-28 05:10:42,388 INFO streaming_executor.py:160 -- Execution plan of Dataset dataset_40_0: InputDataBuffer[Input] -> TaskPoolMapOperator[ListFiles] -> TaskPoolMapOperator[ReadFiles] -> TaskPoolMapOperator[Map(add_class)->Map(convert_to_label)] -> ActorPoolMapOperator[MapBatches(EmbedImages)] -> TaskPoolMapOperator[MapBatches(drop_columns)] -> TaskPoolMapOperator[MapBatches(TorchPredictor)] -> LimitOperator[limit=1]
(MapWorker(MapBatches(EmbedImages)) pid=33395, ip=10.0.5.252) Using a slow image processor as `use_fast` is unset and a slow processor was saved with this model. `use_fast=True` will be the default behavior in v4.52, even if the model was saved with a slow processor. This will result in minor differences in outputs. You'll still be able to use a slow processor with `use_fast=False`.
(MapBatches(TorchPredictor) pid=34104, ip=10.0.5.252) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.)
(MapWorker(MapBatches(EmbedImages)) pid=6674, ip=10.0.5.20) Using a slow image processor as `use_fast` is unset and a slow processor was saved with this model. `use_fast=True` will be the default behavior in v4.52, even if the model was saved with a slow processor. This will result in minor differences in outputs. You'll still be able to use a slow processor with `use_fast=False`. [repeated 3x across cluster]
2025-08-28 05:10:59,374 INFO streaming_executor.py:279 -- ✔️ Dataset dataset_40_0 execution finished in 16.98 seconds
[{'path': 'doggos-dataset/test/basset/basset_10005.jpg',
'class': 'basset',
'label': 30,
'embedding': array([ 8.86104554e-02, -5.89382686e-02, 1.15464866e-01, 2.15815112e-01,
-3.43266308e-01, -3.35150540e-01, 1.48883224e-01, -1.02369718e-01,
-1.69915810e-01, 4.34856862e-03, 2.41593361e-01, 1.79200619e-01,
4.34402555e-01, 4.59785998e-01, 1.59284808e-02, 4.16959971e-01,
5.20779848e-01, 1.86366066e-01, -3.43496174e-01, -4.00813907e-01,
-1.15213782e-01, -3.04853529e-01, 1.77998394e-01, 1.82090014e-01,
-3.56360346e-01, -2.30711952e-01, 1.69025257e-01, 3.78455579e-01,
8.37044120e-02, -4.81875241e-02, 3.17967087e-01, -1.40099749e-01,
-2.15949178e-01, -4.72761095e-01, -3.01893711e-01, 7.59940967e-02,
-2.64865339e-01, 5.89084566e-01, -3.75831634e-01, 3.11807573e-01,
-3.82964134e-01, -1.86417520e-01, 1.07007243e-01, 4.81416702e-01,
-3.70819569e-01, 9.12090182e-01, 3.13470632e-01, -3.69494259e-02,
-2.21142501e-01, 3.32214013e-02, 8.51379186e-02, 3.64337176e-01,
-3.90754700e-01, 4.39904258e-02, 5.39945886e-02, -5.02359867e-01,
-4.76054996e-02, 3.87604594e-01, -3.71239424e-01, -8.79095644e-02,
5.62141061e-01, 1.96927994e-01, 3.54419112e-01, -6.80974126e-03,
2.86425143e-01, -3.24660867e-01, -4.56204057e-01, 6.41017914e-01,
-1.67037442e-01, -2.29641497e-01, 4.71122622e-01, 5.03865302e-01,
-9.06585157e-03, -1.23926058e-01, -3.32888782e-01, 1.59683321e-02,
-5.00816345e-01, -3.53796408e-02, -1.60535276e-01, -2.88702995e-01,
5.51706925e-02, -3.47863048e-01, -3.01085338e-02, -6.00592375e-01,
2.04530790e-01, -1.17298350e-01, 8.88321698e-01, -3.18641007e-01,
2.02193573e-01, -1.50856599e-01, -2.96603352e-01, -5.45758486e-01,
-7.55531311e+00, -3.07271361e-01, -7.33374238e-01, 2.76708573e-01,
-3.76666151e-02, -4.25825119e-01, -5.56892097e-01, 7.15545475e-01,
1.02834240e-01, -1.19939610e-01, 1.94998607e-01, -2.46950224e-01,
2.61530429e-01, -4.19263542e-01, 1.31001920e-01, -2.49398082e-01,
-3.26750994e-01, -3.92482489e-01, 3.30219358e-01, -5.78646958e-01,
1.53134540e-01, -3.10127169e-01, -3.67199332e-01, -7.94161111e-02,
-2.93402106e-01, 2.62198240e-01, 2.91103810e-01, 1.32868871e-01,
-5.78317158e-02, -4.26885992e-01, 2.99195677e-01, 4.23972368e-01,
2.30407149e-01, -2.98300147e-01, -1.55886114e-01, -1.24661736e-01,
-1.17139973e-01, -4.21351314e-01, -1.45010501e-02, -3.06388348e-01,
2.89572328e-01, 9.73405361e-01, -5.52814901e-01, 2.36222595e-01,
-2.13898420e-01, -1.00043082e+00, -3.57041806e-01, -1.50843680e-01,
4.69288528e-02, 2.08646134e-01, -2.70194232e-01, 2.63797104e-01,
1.31332219e-01, 2.82329589e-01, 2.69341841e-02, -1.21627375e-01,
3.80910456e-01, 2.65330970e-01, -3.01948935e-01, -6.39178753e-02,
-3.13922286e-01, -4.14075851e-01, -2.19056532e-01, 2.22424790e-01,
8.13730657e-02, -3.03519934e-01, 9.32400897e-02, -3.76873404e-01,
8.34950879e-02, 1.01878762e-01, 2.87054926e-01, 2.09415853e-02,
-1.22204229e-01, 1.64302550e-02, -2.41174936e-01, 1.78844824e-01,
9.15416703e-03, 1.66462481e-01, -1.45732313e-01, -5.85511327e-04,
2.25536823e-01, 3.30472469e-01, -1.25101686e-01, 1.13093004e-01,
1.52094781e-01, 4.37459409e-01, 3.22061956e-01, 1.37893021e-01,
-2.53650725e-01, -1.94988877e-01, -2.72130489e-01, -2.57504702e-01,
1.92389667e-01, -2.07393348e-01, 1.73574477e-01, 2.59756446e-02,
2.20320046e-01, 6.48344308e-02, 3.96853566e-01, 1.11773282e-01,
-4.38930988e-01, -5.10937572e-02, 5.92644155e-01, 6.10140711e-03,
-3.97206768e-02, 7.65584633e-02, -7.68468618e-01, 1.23042464e-01,
3.48037392e-01, 1.49242997e-01, 2.86662281e-02, 2.79642552e-01,
-2.26151049e-01, -6.73239648e-01, -8.07924390e-01, 8.62701386e-02,
4.94999364e-02, 1.61207989e-02, -1.30242959e-01, 1.77768275e-01,
3.62961054e-01, -3.20745975e-01, 3.67820978e-01, -9.77848917e-02,
-2.64019221e-01, 6.74475431e-01, 9.26629007e-01, -4.54470068e-02,
9.59405363e-01, 3.02993000e-01, -5.81385851e-01, 3.98850322e-01,
7.40434751e-02, 1.79926023e-01, 9.12196040e-02, 2.77938917e-02,
-2.20950916e-02, -1.98561847e-01, -4.33019698e-01, 1.35872006e-01,
-3.84440348e-02, 1.63487554e-01, 5.38927615e-02, 8.52212310e-01,
-8.64772916e-01, -3.00439209e-01, 1.66039094e-02, -4.84181255e-01,
-2.57156193e-01, 4.46582437e-01, 3.71635705e-02, -7.58354291e-02,
-1.38248950e-02, 1.01295078e+00, 2.14489758e-01, -1.17217854e-01,
-2.82662451e-01, 7.08411038e-01, 2.08262652e-01, -1.69240460e-02,
1.02334268e-01, 4.20059741e-01, 1.07706316e-01, -3.89203757e-01,
-5.91410846e-02, -1.77690476e-01, -1.26772380e+00, 1.75859511e-01,
-2.49499828e-01, 1.60166726e-01, 8.72884393e-02, -4.53421593e-01,
1.96858853e-01, -2.25365251e-01, -1.31235719e-02, -4.58204031e-01,
-1.54087022e-01, -1.87472761e-01, 2.73187131e-01, 4.14693624e-01,
6.00348413e-01, 5.16499318e-02, -2.52319247e-01, -2.08351701e-01,
-3.85643661e-01, -6.44139796e-02, -2.70672083e-01, -5.09124994e-02,
-1.17392734e-01, -1.16136428e-02, -1.69710606e-01, 2.30101690e-01,
-6.31506741e-02, 2.20495850e-01, 4.81231391e-01, 3.76428038e-01,
-2.14597031e-01, -4.70009223e-02, 4.38644290e-01, 2.72557199e-01,
-1.89499091e-02, 6.36664629e-02, -4.86765429e-02, -6.02428794e-01,
5.40002957e-02, -9.60005671e-02, 4.63560931e-02, -3.55034113e-01,
2.27724269e-01, -1.30642965e-01, -5.17771959e-01, 7.08835796e-02,
-2.57462114e-01, -4.82860744e-01, 1.13421358e-01, 9.88648832e-02,
6.21988237e-01, 2.64641732e-01, -9.67874378e-03, 1.94528699e-01,
9.72453296e-01, -4.36969042e-01, -5.50681949e-02, 1.42934144e-01,
1.37221038e-01, 5.63952804e-01, -3.20022464e-01, -5.56031644e-01,
9.09894407e-01, 1.02216589e+00, -2.79887915e-01, 1.69066399e-01,
6.48921371e-01, 1.68456510e-02, -2.58911937e-01, 4.62736428e-01,
8.00172612e-03, 1.66315883e-01, -5.30062854e-01, -3.96020412e-01,
4.43380117e-01, -4.35658276e-01, -1.11912012e-01, -5.91614306e-01,
-7.02220649e-02, 1.41544282e-01, -5.65246567e-02, -1.19229007e+00,
-1.00026041e-01, 1.35173336e-01, -1.37986809e-01, 4.58395988e-01,
2.99769610e-01, 1.13845997e-01, -3.23149785e-02, 4.82394725e-01,
-6.13934547e-03, 3.68614852e-01, -4.91497517e-01, -4.97332066e-01,
8.73729736e-02, 3.60586494e-01, -2.91166097e-01, 1.89481646e-01,
2.87948608e-01, 1.90306157e-01, 4.15048778e-01, 3.93784940e-01,
6.75817132e-02, 1.18251920e-01, 2.03508779e-01, 3.09830695e-01,
-1.03927016e+00, 1.00612268e-01, -3.46988708e-01, -7.09752440e-01,
2.20241398e-01, -3.74946982e-01, -1.48783788e-01, -1.31232068e-01,
3.87498319e-01, 1.67044029e-01, -2.79640555e-01, 3.40543866e-01,
1.28378880e+00, 4.47215438e-01, -5.00054121e-01, 6.85076341e-02,
1.93691164e-01, -4.66935217e-01, -3.24348718e-01, 4.53348368e-01,
6.36629641e-01, -5.52294970e-01, -3.59640062e-01, 2.45728597e-01,
4.48195577e-01, -1.36022663e+00, -6.26060665e-01, -4.96963590e-01,
-2.55071461e-01, -2.31453001e-01, -4.22013104e-01, 5.81141561e-02,
1.66424632e-01, -1.81557357e-01, -2.85358205e-02, -1.10628068e+00,
-2.42026821e-01, -4.49676067e-03, 5.53836450e-02, 4.92810488e-01,
5.83105981e-01, 6.97781667e-02, -1.33217961e-01, -1.25093237e-01,
1.17499933e-01, -5.19634366e-01, 1.42042309e-01, 2.34404474e-01,
-2.55929470e-01, 3.23758684e-02, -2.34450802e-01, -7.54091814e-02,
1.83672294e-01, -2.25883007e-01, -4.76478487e-02, -4.84889567e-01,
1.12959743e-03, 1.80705532e-01, -5.87785244e-02, 4.82457250e-01,
-1.88920692e-01, 1.47517592e-01, 1.10182568e-01, -2.28278339e-02,
8.62778306e-01, 4.46689427e-02, 4.16403189e-02, -1.07179873e-01,
-1.42522454e+00, -2.31161788e-02, 3.05959303e-02, -6.58722073e-02,
-3.69132429e-01, 3.49290550e-01, -1.39178723e-01, -3.51127565e-01,
5.00785351e-01, 2.31236637e-01, 6.77590072e-02, -3.59323025e-02,
2.69076526e-01, -3.60533416e-01, 1.48107335e-01, -1.11518174e-01,
1.65307403e-01, -1.74086124e-01, 6.01880312e-01, -5.95235109e-01,
5.29538319e-02, 3.12422097e-01, -1.14403330e-01, 2.30422497e-01,
-9.48345065e-02, 3.76421027e-02, 4.77573276e-02, 3.89954895e-01,
-1.91829026e-01, -6.26232028e-01, 1.29549801e-01, -2.84714490e-01,
2.88834363e-01, 6.25569642e-01, -2.44193405e-01, 3.08956832e-01,
-4.79587227e-01, 1.59115836e-01, -1.07442781e-01, 1.57203451e-01,
-8.51369202e-02, -1.20136715e-01, -2.91232206e-02, 1.08408488e-01,
-5.97195402e-02, -1.21715315e-01, -5.79822421e-01, 3.90639007e-01,
-2.83878148e-01, -2.72939146e-01, 3.87672335e-04, -2.62640566e-01,
-1.67415068e-01, 1.97720259e-01, 3.60535234e-01, -1.85247302e-01,
-2.80813038e-01, 3.32875013e-01, -3.98125350e-01, -3.53022516e-02,
5.48863769e-01, -1.35882646e-01, 2.50048220e-01, -1.27448589e-01,
-3.03174406e-01, 3.85489166e-02, -7.27320850e-01, 5.22592783e-01,
-1.97360516e-01, -1.98229402e-01, -1.42074719e-01, 4.11824808e-02,
-2.92105675e-01, 2.07964912e-01, 4.97746691e-02, 1.48062438e-01,
-2.94304550e-01, 7.31720269e-01, 1.14105418e-02, 5.50758056e-02],
dtype=float32),
'prediction': 8}]
def batch_metric(batch):
labels = batch["label"]
preds = batch["prediction"]
mcm = multilabel_confusion_matrix(labels, preds)
tn, fp, fn, tp = [], [], [], []
for i in range(mcm.shape[0]):
tn.append(mcm[i, 0, 0]) # True negatives
fp.append(mcm[i, 0, 1]) # False positives
fn.append(mcm[i, 1, 0]) # False negatives
tp.append(mcm[i, 1, 1]) # True positives
return {"TN": tn, "FP": fp, "FN": fn, "TP": tp}
# Aggregated metrics after processing all batches.
metrics_ds = pred_ds.map_batches(batch_metric)
aggregate_metrics = metrics_ds.sum(["TN", "FP", "FN", "TP"])
# Aggregate the confusion matrix components across all batches.
tn = aggregate_metrics["sum(TN)"]
fp = aggregate_metrics["sum(FP)"]
fn = aggregate_metrics["sum(FN)"]
tp = aggregate_metrics["sum(TP)"]
# Calculate metrics.
precision = tp / (tp + fp) if (tp + fp) > 0 else 0
recall = tp / (tp + fn) if (tp + fn) > 0 else 0
f1 = 2 * precision * recall / (precision + recall) if (precision + recall) > 0 else 0
accuracy = (tp + tn) / (tp + tn + fp + fn)
2025-08-28 05:10:59,627 INFO logging.py:295 -- Registered dataset logger for dataset dataset_43_0
2025-08-28 05:10:59,639 INFO streaming_executor.py:159 -- Starting execution of Dataset dataset_43_0. Full logs are in /tmp/ray/session_2025-08-28_04-57-43_348032_12595/logs/ray-data
2025-08-28 05:10:59,640 INFO streaming_executor.py:160 -- Execution plan of Dataset dataset_43_0: InputDataBuffer[Input] -> TaskPoolMapOperator[ListFiles] -> TaskPoolMapOperator[ReadFiles] -> TaskPoolMapOperator[Map(add_class)->Map(convert_to_label)] -> ActorPoolMapOperator[MapBatches(EmbedImages)] -> TaskPoolMapOperator[MapBatches(drop_columns)] -> TaskPoolMapOperator[MapBatches(TorchPredictor)] -> TaskPoolMapOperator[MapBatches(batch_metric)] -> AllToAllOperator[Aggregate] -> LimitOperator[limit=1]
(MapWorker(MapBatches(EmbedImages)) pid=34103, ip=10.0.5.252) Using a slow image processor as `use_fast` is unset and a slow processor was saved with this model. `use_fast=True` will be the default behavior in v4.52, even if the model was saved with a slow processor. This will result in minor differences in outputs. You'll still be able to use a slow processor with `use_fast=False`.
(MapBatches(TorchPredictor) pid=8149, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.)
(MapWorker(MapBatches(EmbedImages)) pid=40389, ip=10.0.5.252) Using a slow image processor as `use_fast` is unset and a slow processor was saved with this model. `use_fast=True` will be the default behavior in v4.52, even if the model was saved with a slow processor. This will result in minor differences in outputs. You'll still be able to use a slow processor with `use_fast=False`. [repeated 3x across cluster]
(MapBatches(TorchPredictor) pid=8263, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=8340, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=17879, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=18144, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=18411, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=18682, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=18950, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=19219, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
(MapBatches(TorchPredictor) pid=19564, ip=10.0.5.20) /tmp/ipykernel_31027/417303983.py:6: UserWarning: The given NumPy array is not writable, and PyTorch does not support non-writable tensors. This means writing to this tensor will result in undefined behavior. You may want to copy the array to protect its data or make it writable before converting it to a tensor. This type of warning will be suppressed for the rest of this program. (Triggered internally at /pytorch/torch/csrc/utils/tensor_numpy.cpp:203.) [repeated 4x across cluster]
2025-08-28 05:12:20,741 INFO streaming_executor.py:279 -- ✔️ Dataset dataset_43_0 execution finished in 81.10 seconds
print(f"Precision: {precision:.2f}")
print(f"Recall: {recall:.2f}")
print(f"F1: {f1:.2f}")
print(f"Accuracy: {accuracy:.2f}")
Precision: 0.84
Recall: 0.84
F1: 0.84
Accuracy: 0.98
🚨 Note: Reset this notebook using the “🔄 Restart” button location at the notebook’s menu bar. This way we can free up all the variables, utils, etc. used in this notebook.