Handling Failures and Node Preemption#
Important
This user guide shows how to configure fault tolerance for the revamped Ray Train V2
available starting from Ray 2.43 by enabling the environment variable RAY_TRAIN_V2_ENABLED=1.
This user guide assumes that the environment variable has been enabled.
Please see here for information about the deprecation and migration.
Ray Train provides fault tolerance at three levels:
Worker process fault tolerance handles errors that happen to one or more Train worker processes while they are executing the user defined training function.
Worker node fault tolerance handles node failures that may occur during training.
Job driver fault tolerance handles the case where Ray Train driver process crashes, and training needs to be kicked off again, possibly from a new cluster.
This user guide covers how to configure and use these fault tolerance mechanisms.
Worker Process and Node Fault Tolerance#
Worker process failures are errors that occur within the user defined training function of a training worker, such as GPU out-of-memory (OOM) errors, cloud storage access errors, or other runtime errors.
Node failures are errors that bring down the entire node, including node preemption, OOM, network partitions, or other hardware failures. This section covers worker node failures. Recovery from head node failures is discussed in the next section.
Ray Train can be configured to automatically recover from worker process and worker node failures. When a failure is detected, all the workers are shut down, new nodes are added if necessary, and a new set of workers is started. The restarted training worker processes can resume training by loading the latest checkpoint.
In order to retain progress upon recovery, your training function should implement logic for both saving and loading checkpoints. Otherwise, the training will just start from scratch.
Each recovery from a worker process or node failure is considered a retry. The
number of retries is configurable through the max_failures attribute of the
FailureConfig argument set in the RunConfig
passed to the Trainer. By default, worker fault tolerance is disabled with max_failures=0.
import ray.train
# Tries to recover a run up to this many times.
failure_config = ray.train.FailureConfig(max_failures=2)
# No limit on the number of retries.
failure_config = ray.train.FailureConfig(max_failures=-1)
Altogether, this is what an example Torch training script with worker fault tolerance looks like:
import tempfile
import uuid
import ray.train
import ray.train.torch
def train_fn_per_worker(train_loop_config: dict):
# [1] Train worker restoration logic.
checkpoint = ray.train.get_checkpoint()
if checkpoint:
with checkpoint.as_directory() as temp_checkpoint_dir:
# model.load_state_dict(torch.load(...))
...
# [2] Checkpoint saving and reporting logic.
with tempfile.TemporaryDirectory() as temp_checkpoint_dir:
# torch.save(...)
ray.train.report(
{"loss": 0.1},
checkpoint=ray.train.Checkpoint.from_directory(temp_checkpoint_dir),
)
trainer = ray.train.torch.TorchTrainer(
train_fn_per_worker,
scaling_config=ray.train.ScalingConfig(num_workers=4),
run_config=ray.train.RunConfig(
# (If multi-node, configure S3 / NFS as the storage path.)
# storage_path="s3://...",
name=f"train_run-{uuid.uuid4().hex}",
# [3] Enable worker-level fault tolerance to gracefully handle
# Train worker failures.
failure_config=ray.train.FailureConfig(max_failures=3),
),
)
trainer.fit()
Which checkpoint will be restored?#
Ray Train will populate ray.train.get_checkpoint() with the latest available
checkpoint reported to Ray Train.
The Checkpoint object returned by this method has the
as_directory() and to_directory() methods
to download the checkpoint from the RunConfig(storage_path) to local disk.
Note
as_directory() and to_directory()
will only download the checkpoint once per node even if there are multiple workers on the node.
The workers share the same checkpoint directory on local disk.
Illustrated Example#
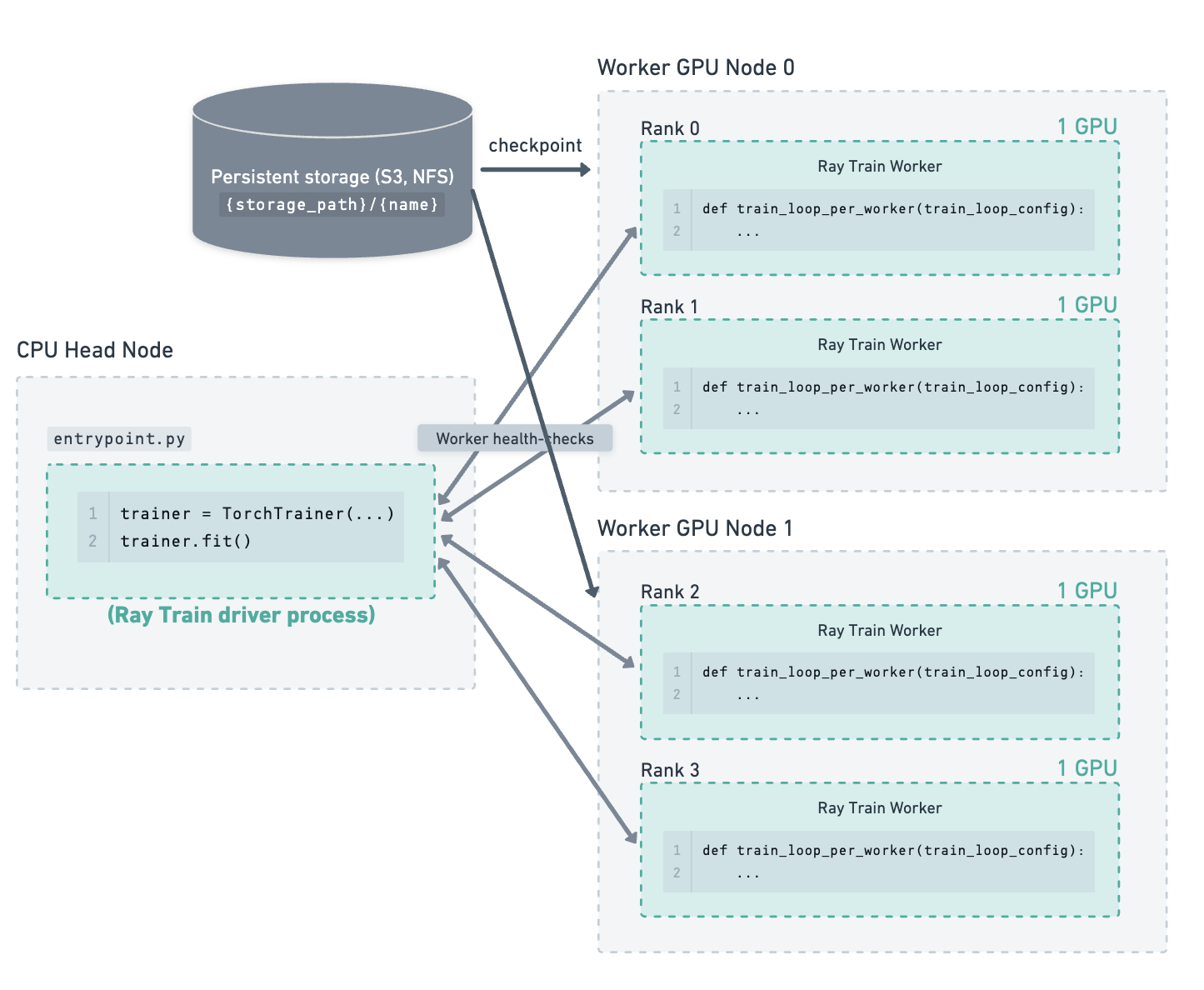
Consider the following example of a cluster containing a CPU head node and 2 GPU worker nodes. There are 4 GPU training workers running on the 2 worker nodes. The storage path has been configured to use cloud storage, which is where checkpoints are saved.
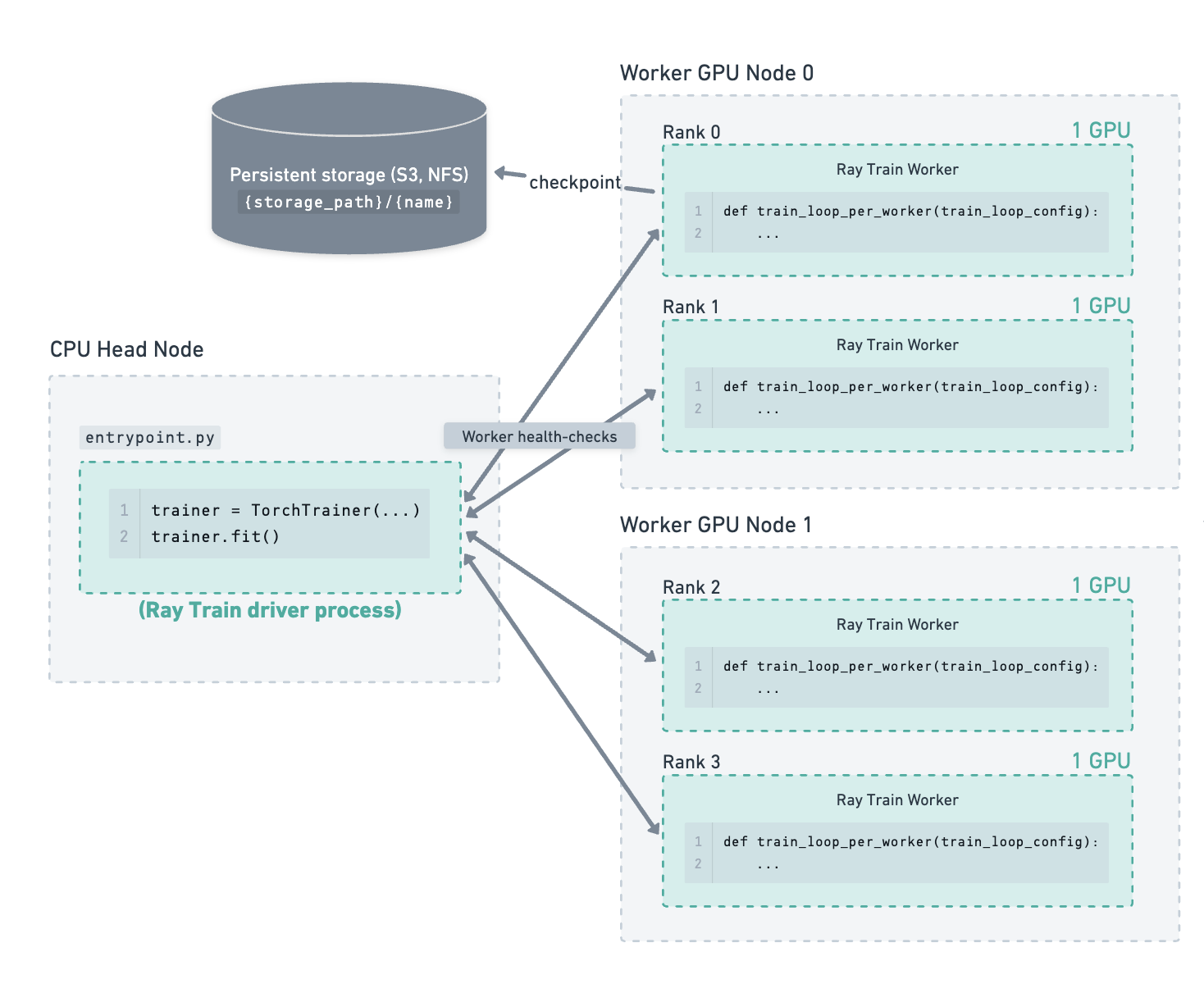
Training has been running for some time, and the latest checkpoint has been saved to cloud storage.#
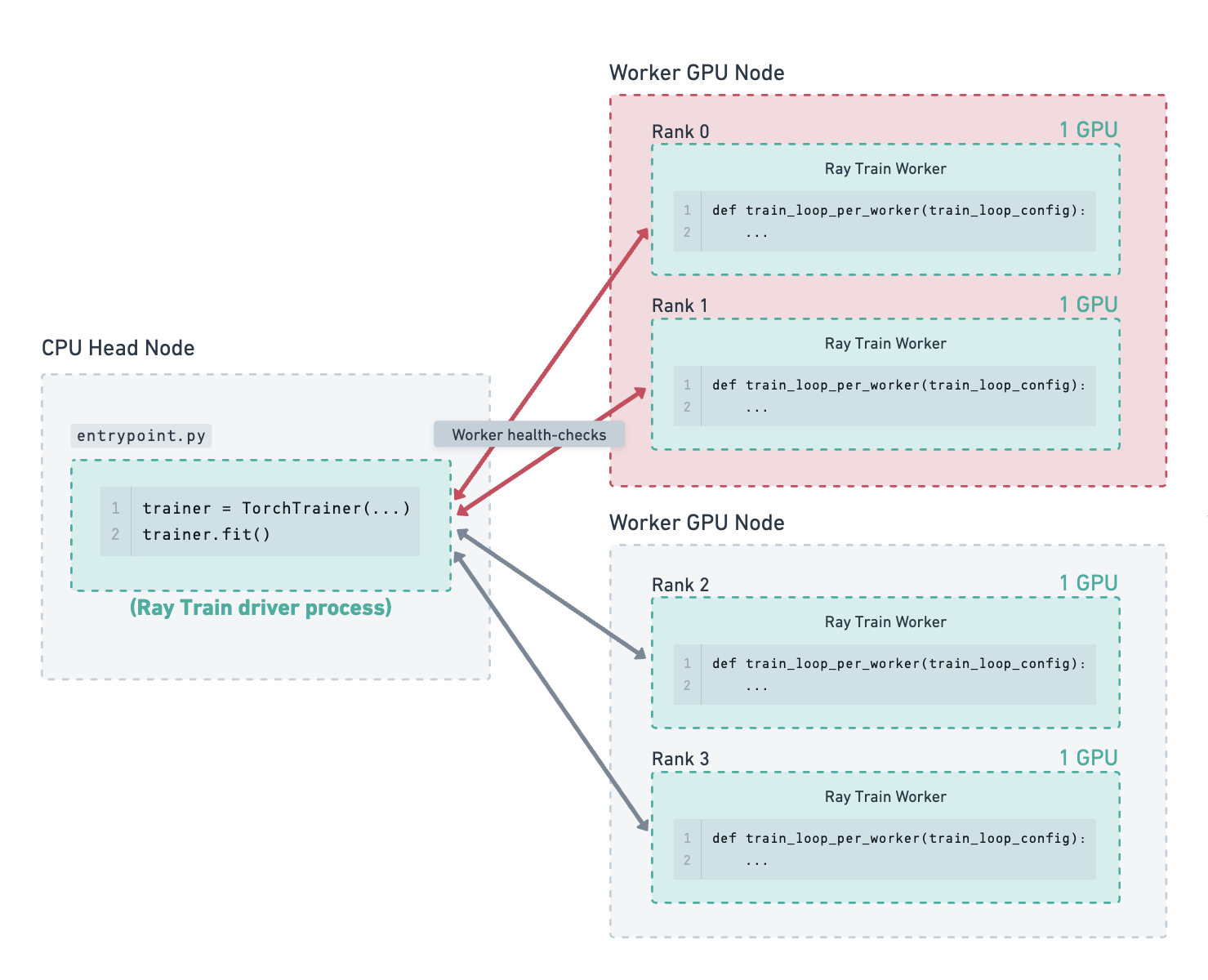
One of the worker GPU nodes fails due to a hardware fault. Ray Train detects this failure and shuts down all the workers.
Since the number of failures detected so far is less than the configured max_failures, Ray Train will attempt to restart training,
rather than exiting and raising an error.#
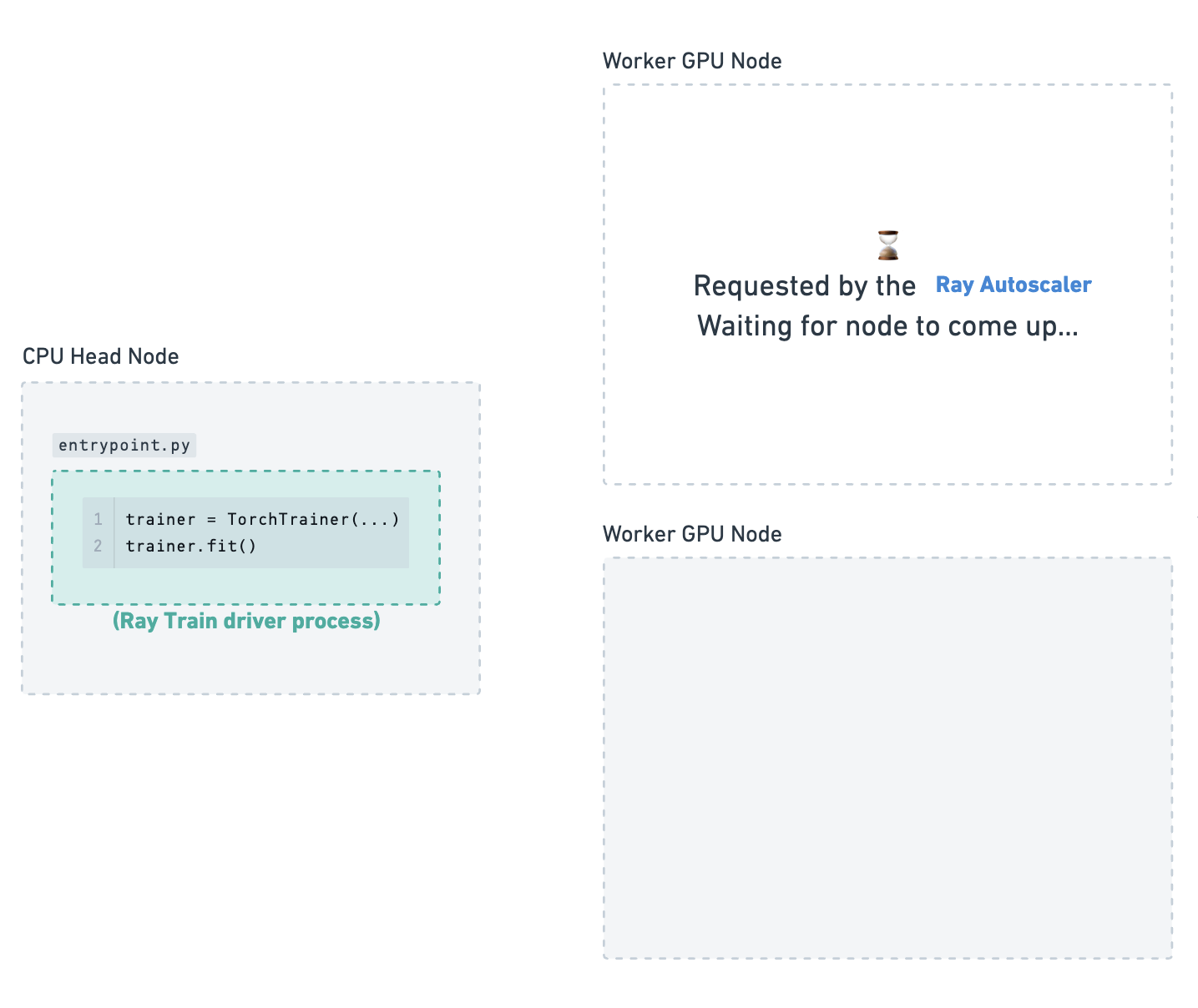
Ray Train has requested a new worker node to join the cluster and is waiting for it to come up.#
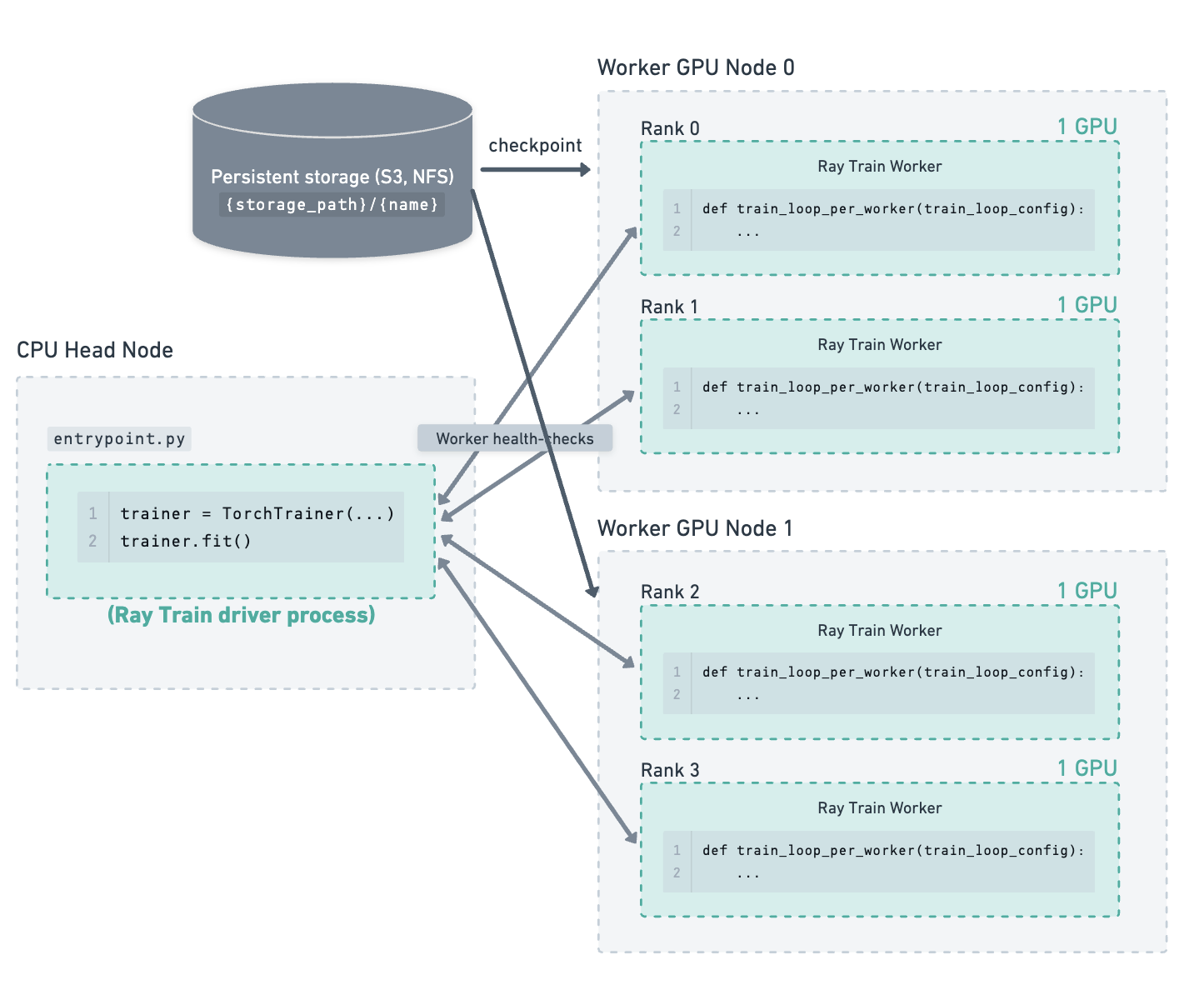
The new worker node has joined the cluster. Ray Train restarts all the worker processes and provides them with the latest checkpoint. The workers download the checkpoint from storage and use it to resume training.#
Job Driver Fault Tolerance#
Job driver fault tolerance is to handle cases where the Ray Train driver process is interrupted.
The Ray Train driver process is the process that calls trainer.fit() and is usually located on the head node of the cluster.
The driver process may be interrupted due to one of the following reasons:
The run is manually interrupted by a user (e.g., Ctrl+C).
The node where the driver process is running (head node) crashes (e.g., out of memory, out of disk).
The entire cluster goes down (e.g., network error affecting all nodes).
In these cases, the Ray Train driver (which calls trainer.fit()) needs to be launched again.
The relaunched Ray Train driver needs to find a minimal amount of run state in order to pick up where the previous run left off.
This state includes the latest reported checkpoints, which are located at the storage path.
Ray Train fetches the latest checkpoint information from storage and passes it to the newly launched worker processes to resume training.
To find this run state, Ray Train relies on passing in the same RunConfig(storage_path, name) pair as the previous run.
If the storage_path or name do not match, Ray Train will not be able to find the previous run state and will start a new run from scratch.
Warning
If name is reused unintentionally, Ray Train will fetch the previous run state, even if the user is trying to start a new run.
Therefore, always pass a unique run name when launching a new run. In other words, name should be a unique identifier for a training job.
Note
Job driver crashes and interrupts do not count toward the max_failures limit of worker fault tolerance.
Here’s an example training script that highlights best practices for job driver fault tolerance:
# entrypoint.py
import argparse
import tempfile
import uuid
import ray.train
import ray.train.torch
def train_fn_per_worker(train_loop_config: dict):
# [1] Train worker restoration logic.
checkpoint = ray.train.get_checkpoint()
if checkpoint:
with checkpoint.as_directory() as temp_checkpoint_dir:
# model.load_state_dict(torch.load(...))
...
# [2] Checkpoint saving and reporting logic.
with tempfile.TemporaryDirectory() as temp_checkpoint_dir:
# torch.save(...)
ray.train.report(
{"loss": 0.1},
checkpoint=ray.train.Checkpoint.from_directory(temp_checkpoint_dir),
)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--storage_path", type=str, required=True)
parser.add_argument("--run_name", type=str, required=True)
args = parser.parse_args()
trainer = ray.train.torch.TorchTrainer(
train_fn_per_worker,
scaling_config=ray.train.ScalingConfig(num_workers=4),
run_config=ray.train.RunConfig(
# [3] Enable worker-level fault tolerance to gracefully handle
# Train worker failures.
failure_config=ray.train.FailureConfig(max_failures=3),
# [4] (Recommendation) The (storage_path, name) pair should be
# determined by the job submitter and passed in as arguments
# to the entrypoint script.
storage_path=args.storage_path,
name=args.run_name,
),
)
trainer.fit()
Then, the entrypoint script can be launched with the following command:
python entrypoint.py --storage_path s3://my_bucket/ --run_name unique_run_id=da823d5
If the job is interrupted, the same command can be used to resume training.
This example shows a da823d5 id, which is determined by the one launching the job. The id can often be used for other purposes such as setting the wandb or mlflow run id.
Illustrated Example#
Consider the following example of a cluster containing a CPU head node and 2 GPU worker nodes. There are 4 GPU training workers running on the 2 worker nodes. The storage path has been configured to use cloud storage, which is where checkpoints are saved.
Training has been running for some time, and the latest checkpoints and run state has been saved to storage.#
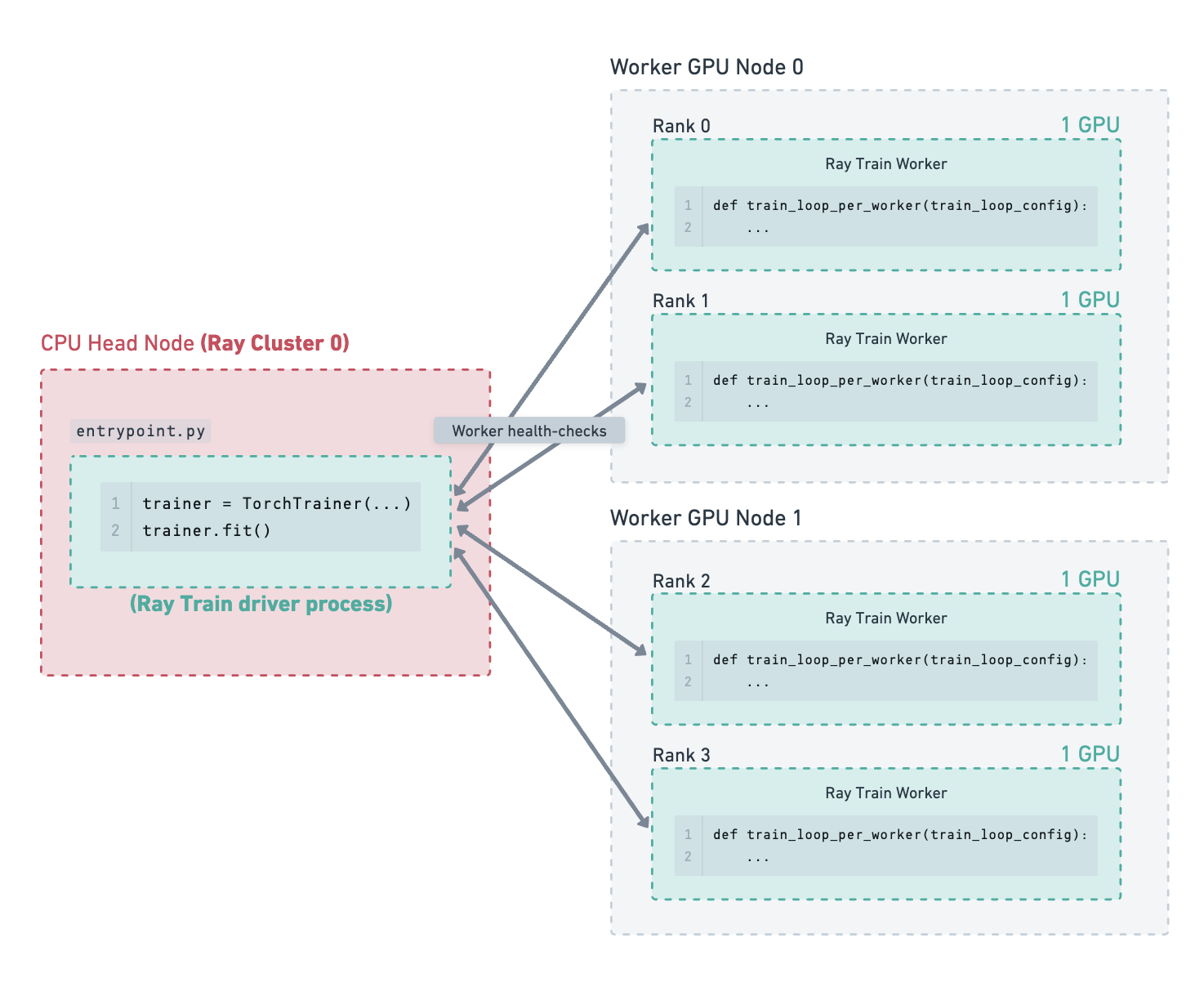
The head node crashes for some reason (e.g., an out-of-memory error), and the Ray Train driver process is interrupted.#
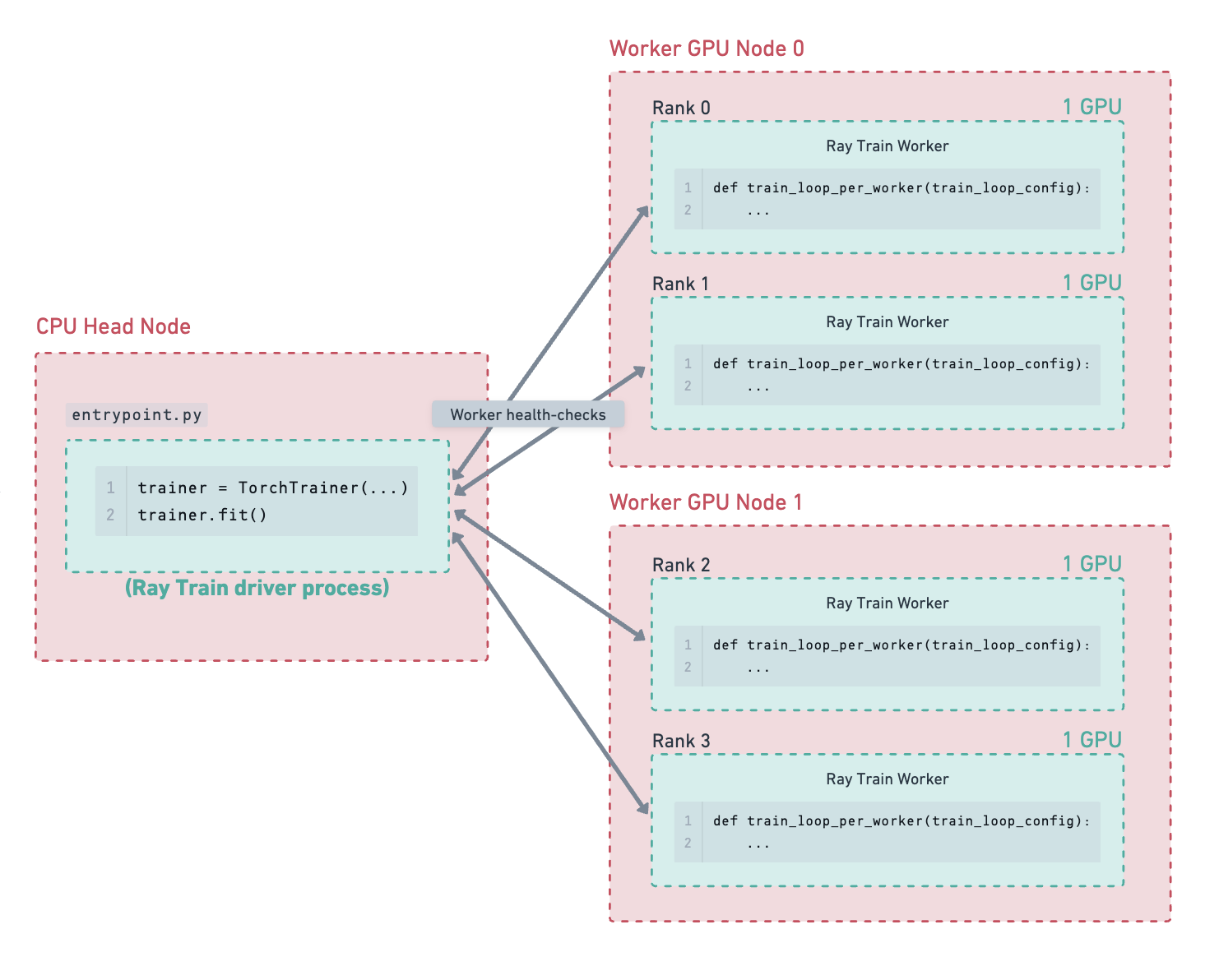
The entire cluster goes down due to the head node failure.#
A manual cluster restart or some job submission system brings up a new Ray cluster.
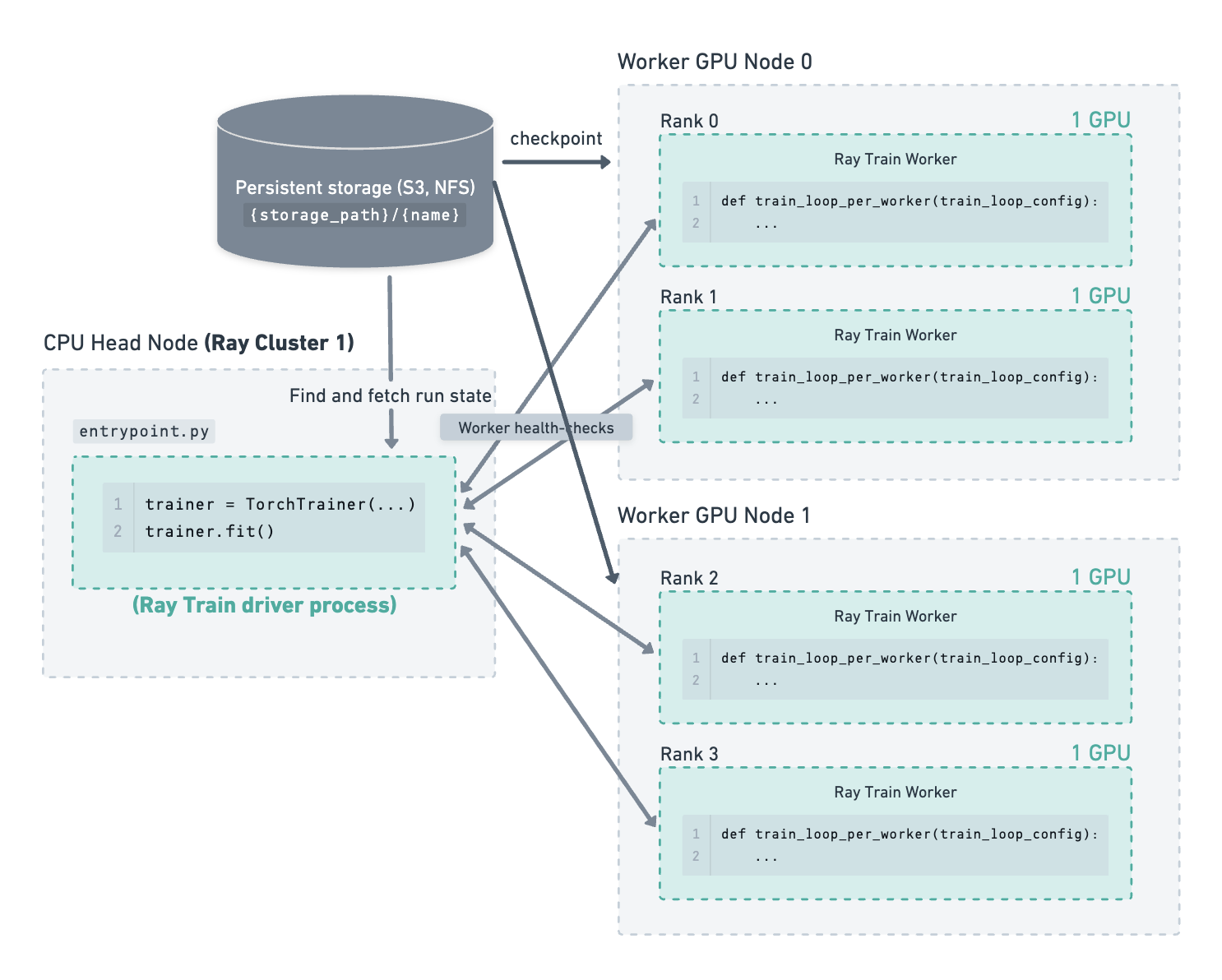
The Ray Train driver process runs on a new head node.
Ray Train fetches the run state information from storage at {storage_path}/{name} (e.g., s3://my_bucket/my_run_name)
and passes the latest checkpoint to the newly launched worker processes to resume training.#
Fault Tolerance API Deprecations#
<Framework>Trainer.restore API Deprecation#
The <Framework>Trainer.restore and <Framework>Trainer.can_restore APIs are deprecated as of Ray 2.43 and will be removed in a future release.
Motivation#
This API change provides several benefits:
Avoid saving user code to pickled files: The old API saved user code to pickled files, which could lead to issues with deserialization, leading to unrecoverable runs.
Improved configuration experience: While some configurations were loaded from the pickled files, certain arguments were required to be re-specified, and another subset of arguments could even be optionally re-specified. This confused users about the set of configurations that are actually being used in the restored run.
Migration Steps#
To migrate from the old <Framework>Trainer.restore API to the new pattern:
Enable the environment variable
RAY_TRAIN_V2_ENABLED=1.Replace
<Framework>Trainer.restorewith the regular<Framework>Trainerconstructor, making sure to pass in the samestorage_pathandnameas the previous run.
<Framework>Trainer(restore_from_checkpoint) API Deprecation#
The <Framework>Trainer(restore_from_checkpoint) API is deprecated as of Ray 2.43 and will be removed in a future release.
Motivation#
This API was a common source of confusion that provided minimal value. It was only used to set the initial value of ray.train.get_checkpoint() but did not load any other run state.
Migration Steps#
Simply pass in the initial checkpoint through the train_loop_config argument. See the migration guide linked below for a code example.
Additional Resources#
Train V2 Migration Guide: Full migration guide for Train V2
Train V2 REP: Technical details about the API change
Handling Failures and Node Preemption (Deprecated API): Documentation for the old API